Comparing Forward Looking Sonars for Navigation

Comparing sonar systems can be like comparing apples and oranges
As with many technical products, understanding the differences between navigation sonar products sold by different vendors can be confusing. Much of the technical product literature can be confusing with different companies assigning different meanings to similar terms. At trade shows, we are often asked "What's the difference between Company X's product and yours?" or "Which is a better? FarSounder's sonars or Company B's sonars?". We don't like to presume we know every detail about every sonar on the market. Rather, we believe that once a customer understands which metrics they should be considering they can easily choose the best "look ahead sonar" for them. For our customers' class of ships, we're confident that they will choose a FarSounder. In this blog posting, we'll take a look at what we feel are the most important metrics you should use to compare forward looking sonars: Coverage Zone and Update Rate.
Coverage Zone
The most important metric in evaluating a forward looking navigation sonar is "coverage zone". If the sonar can't detect navigation hazards, it can't be used to protect a ship. Coverage zone is a pretty broad term and actually covers a number of characteristics:
Detection Range
Water Depth Performance
Field-of-View
Vertical View
Each of the above characteristics are discussed briefly in the following sub-sections.
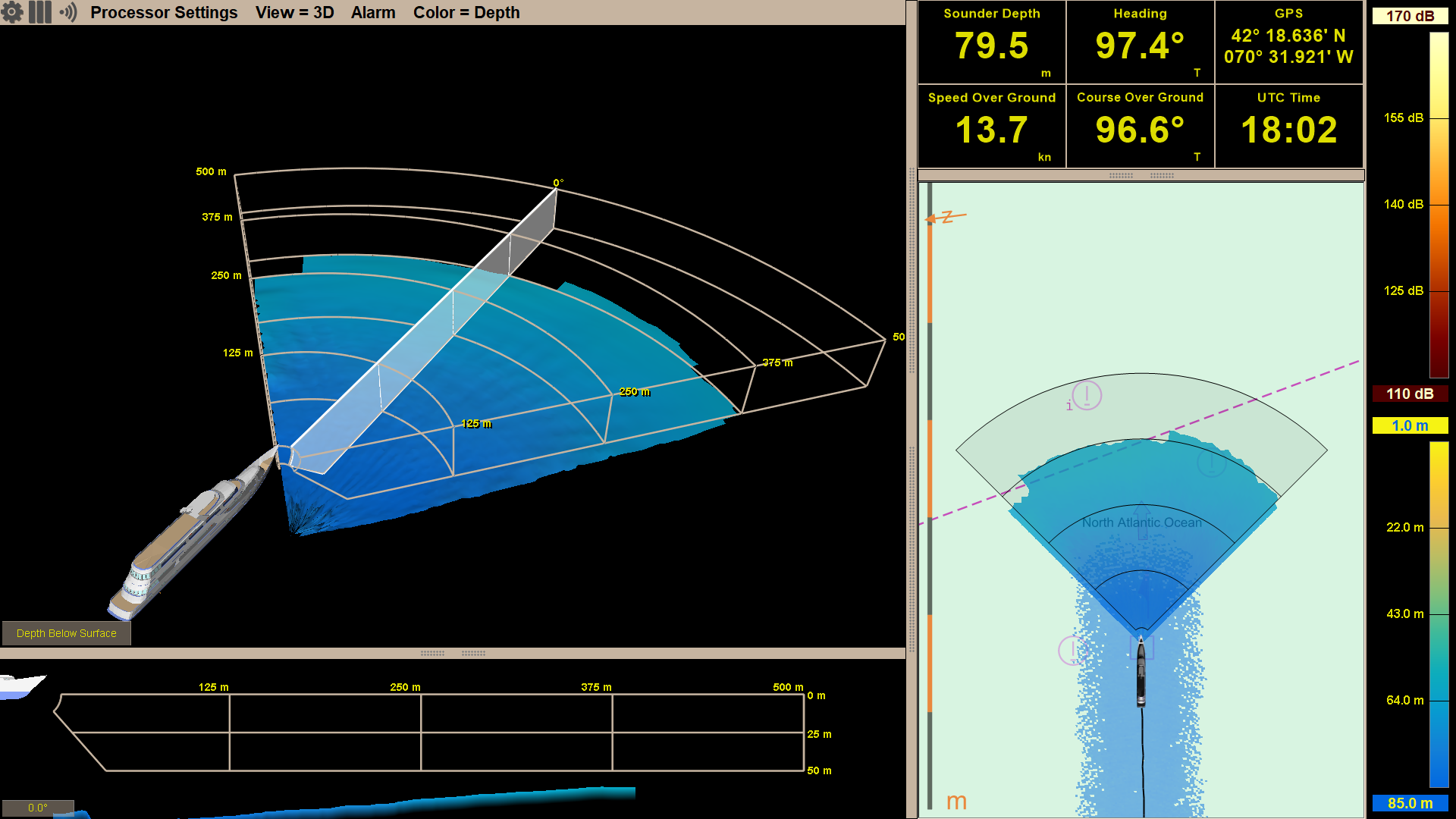
Detection Range

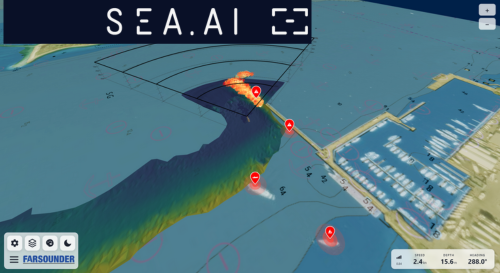
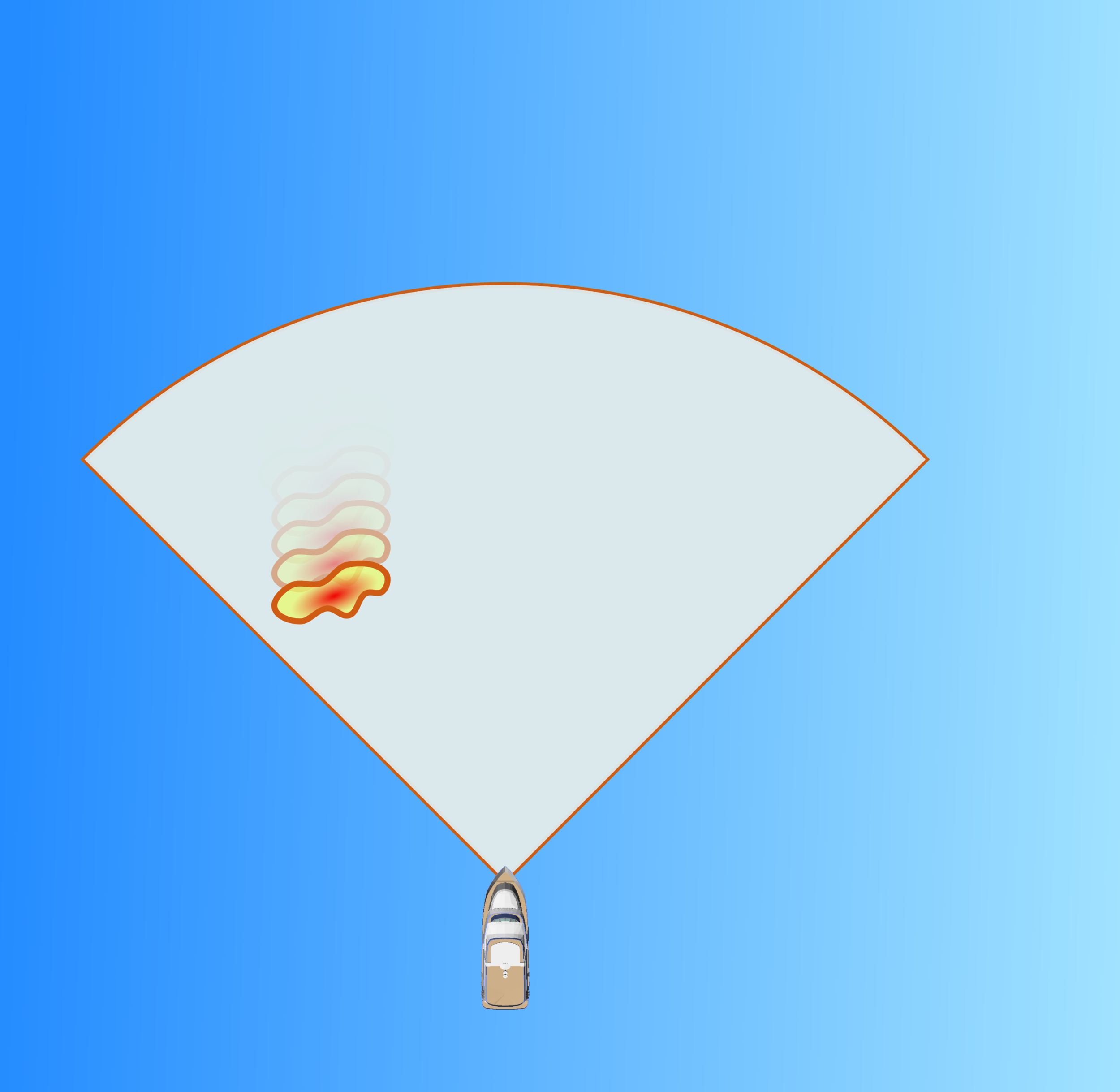
Field-of-view and detection range for an Argos 1000 sonar.
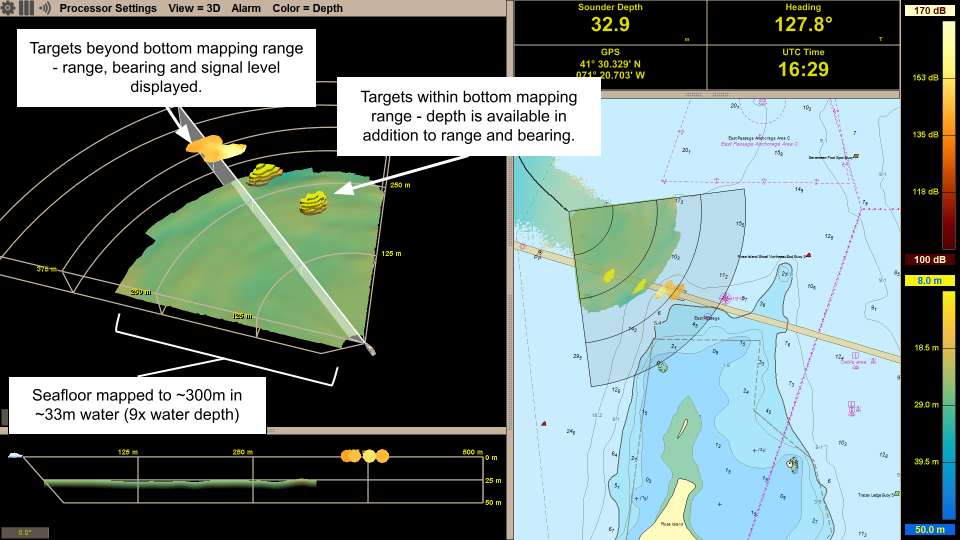
One metric which seems obvious is range. But even range metrics can be deceiving as it should be evaluated both for maximum detection range to an obstacle AND maximum range at which the sonar can map the bottom (i.e. the water depth limit).
Beyond the water depth limit, our sonars can still detect navigation obstacles out to the full range of the product. This is true even in shallow water. In this case, the maximum detection range is a function of how good the obstacle reflects sound. Small buoys will be detected at shorter ranges than large rocks and reefs. This means that with a Argos 1000, you can detect obstacles out to 1/2 nautical mile (1000 meters) ahead of the vessel.
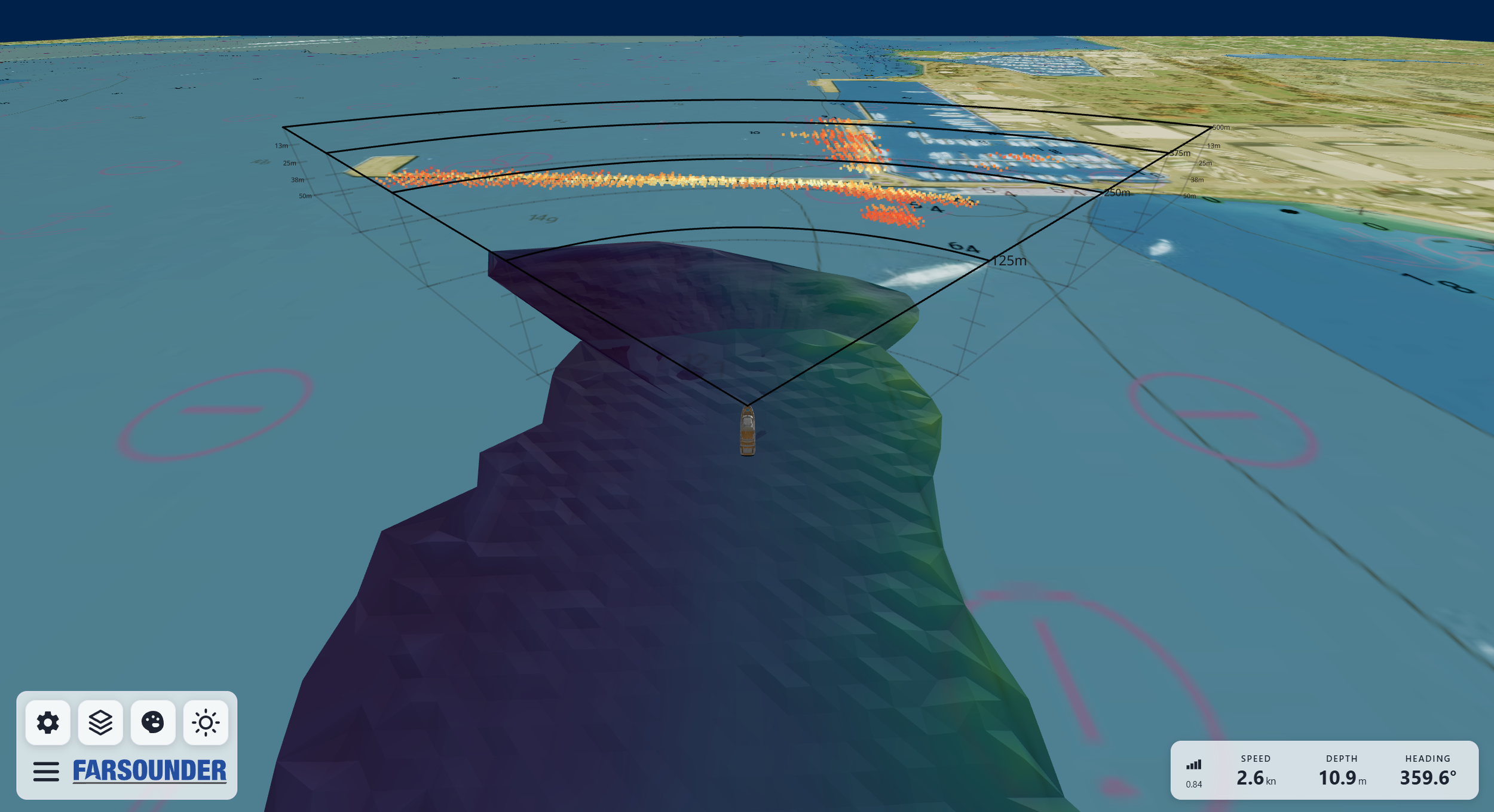
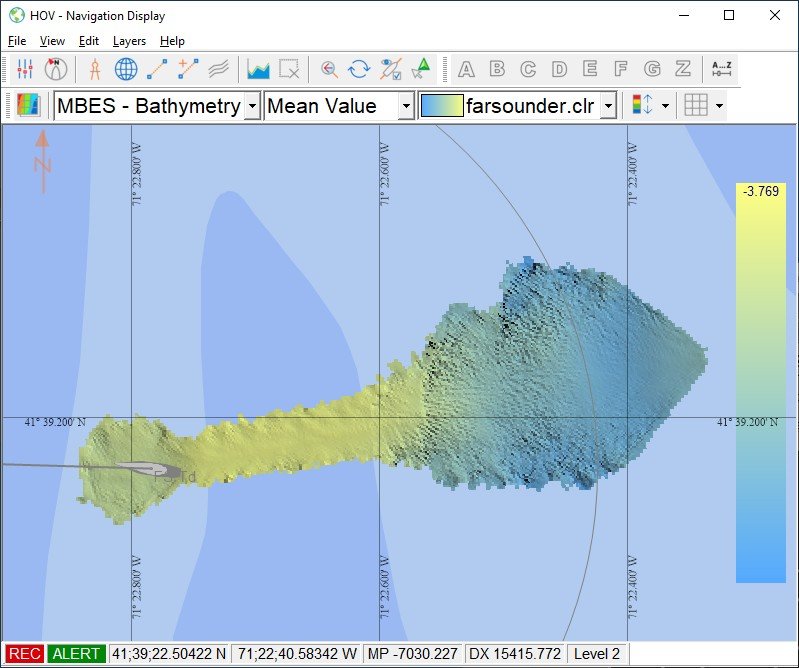
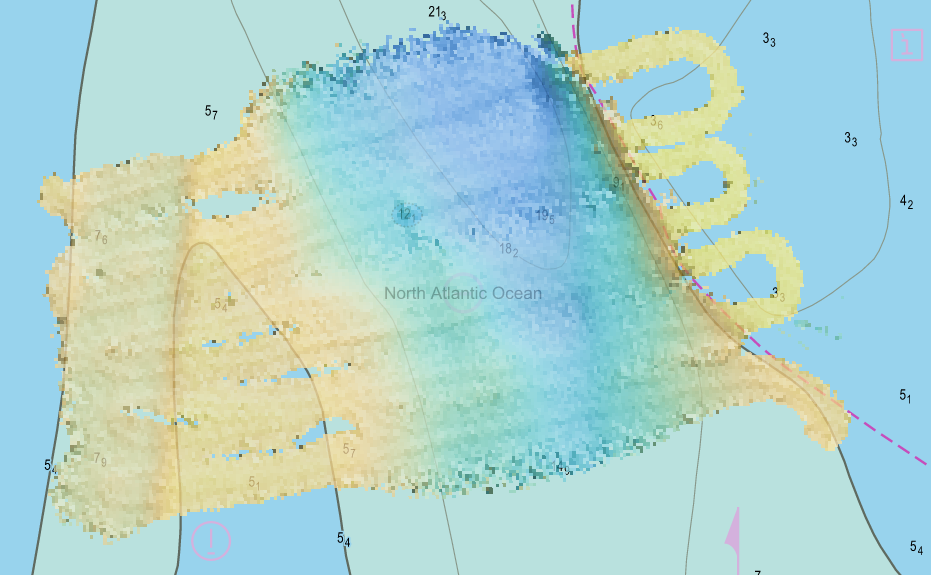
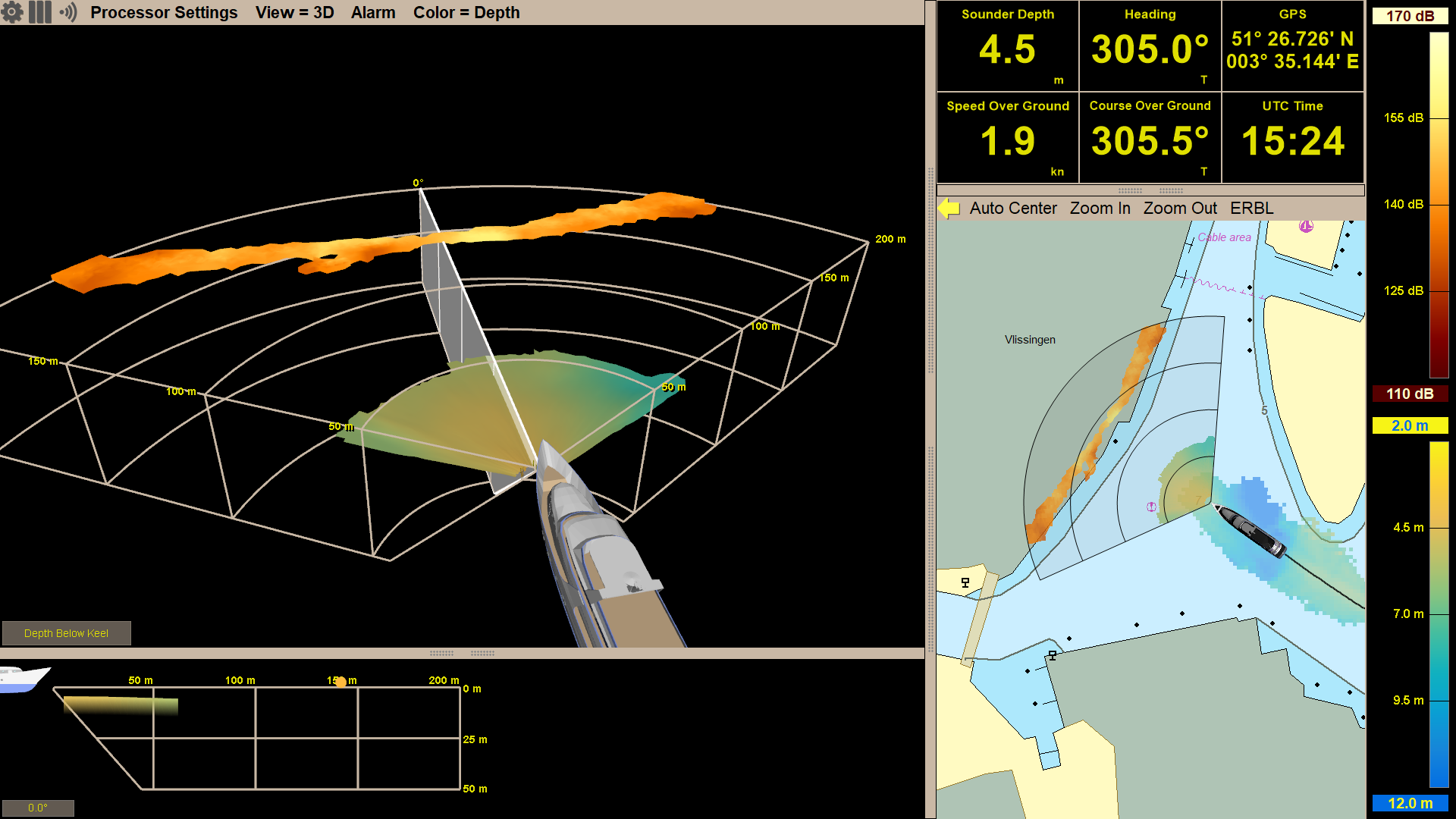
Water Depth Performance
Navigation sonars like ours are more than just a forward looking depth sounder. They can produce a complete 3 dimensional image of the sea floor ahead of the ship. The maximum distance of this 3D map ahead of the ship is a function of the depth of water below the sonar. This type of range is often called "water depth limit". Our products are specified as "8 water depth sonars". This means we can generally produce a 3D map out to a distance of at least 8 times the depth below the transducer. Often, our products do much better than this as you can see in many of our screen shots and videos.
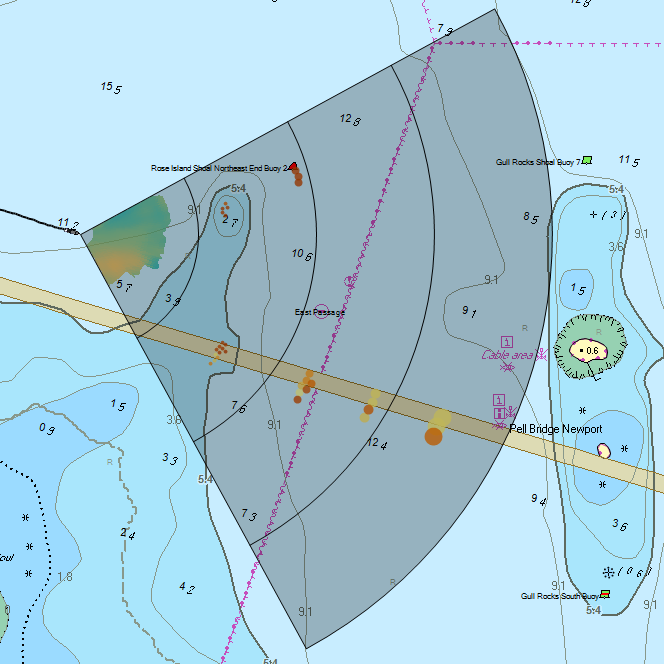
Field-of-View
Sometimes referred to as sector size, a sonar's field-of-view defines the horizontal angle displayed to the user. FarSounder's navigation sonars have a 90° field-of-view out to 500 meters (1/4 nautical mile) range and a 60° field-of-view out to 1000 meters (1/2 nautical mile) range. These large field-of-views are generated with a single ping and enable the ship operator to see what would be ahead of them if they change course. Some forward looking sonars only provide a single vertical slice ahead of the boat. With these sonars it would be necessary to change heading into the unknown to see what is in that direction.
Vertical View
In addition to the horizontal field-of-view, all forward looking sonars have some sort of vertical view. The way a sonar is installed has a significant effect on how this vertical coverage can be utilized and varies greatly from product to product. Some sonars are designed to be installed on the bottom of the hull similar to an echosounder. Because these installations are below the hull, the sonar is pointed downwards. For example, many 2D horizontal forward looking sonars have about 12° of vertical coverage and are designed to point downward 20°. Amazingly, by design these sonars will never detect any object that the vessel can hit! They can only detect objects that are below the hull.
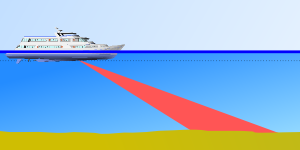
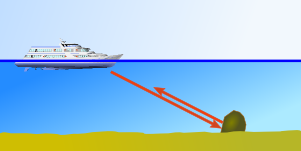
12° vertical coverage angled down 20° can't detect objects from the sea surface to the keel.
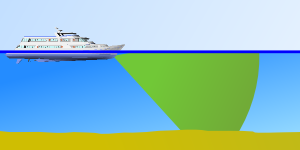
Good vertical coverage can detect objects from the sea surface to the sea floor.
FarSounder's navigation products are designed to be installed facing forward not down. Additionally, our products look up as well as down from the bow. This enables our sonars to detect targets below the vessel and all the way up to the sea surface.
Update Rate
The second most important metric is "update rate". To provide the situational awareness needed to avoid hazards, an effective navigation sonar needs a fast update rate. This allows the user to better understand the underwater scene ahead of them as the vessel moves and conditions change. It also enables our processing software to compare the signals from ping to ping and track in-water targets. This results in an image that is significantly more stable than one generated from a single ping.
Scanning sonars need to build an image from multiple pings. Unlike radar signals, which travel at the speed of light, sonar signals move pretty slow in water. This means that scanning sonars can't provide a good update rate at navigationally significant ranges. Some very sophisticated deep water fishing sonars can detect targets at a couple of thousand meters range. But don't be tricked, the update rate for a field-of-view similar to a FarSounder navigation sonar can be minutes! Some forward scanning sonars are marketed for navigation. Check out their update rates.
Our navigation products have update rates of 0.3-3 seconds (depending upon range) for the entire field of view.
Summary
Though it seems there are a number of different metrics to evalutate a sonar's usefulness for navigation, there are only really two: coverage zone and update rate. You need both to have a useful tool for navigation. If the field of view is compromised, then there won't be enough information about what is in front of the boat. Not looking far enough in range, to the surface, or deep enough are all examples of this limitation. On the other hand, having a good field of view that is updated every couple minutes will not allow for timely navigation when a vessel is underway. When comparing "this sonar" vs, "that sonar", try using these metrics to evaluate your options. At FarSounder we've worked hard to make our forward looking sonar systems an optimal blend of these metrics.