Shallow and Deep Water Bottom Mapping Capabilities
FarSounder Argos 3D forward looking navigation sonars look for both the seafloor and potential navigation hazards anywhere in the water column ahead of the vessel. Hazards in the water column are detected as in-water targets and can be detected out to full range of the sonar (dependent upon target size). The maximum detection ranges for the Argos 350, Argos 500 and Argos 1000 are 350 meters (~1150 feet), 500 meters (~1640 feet), and 1000 meters (~3280 feet) respectively..
While the maximum in-water target detection range is a set distance for each product, maximum bottom detection range is not. The maximum bottom detection range, or bottom mapping range is dependent on the depth of water below the transducer module, not the Argos model.
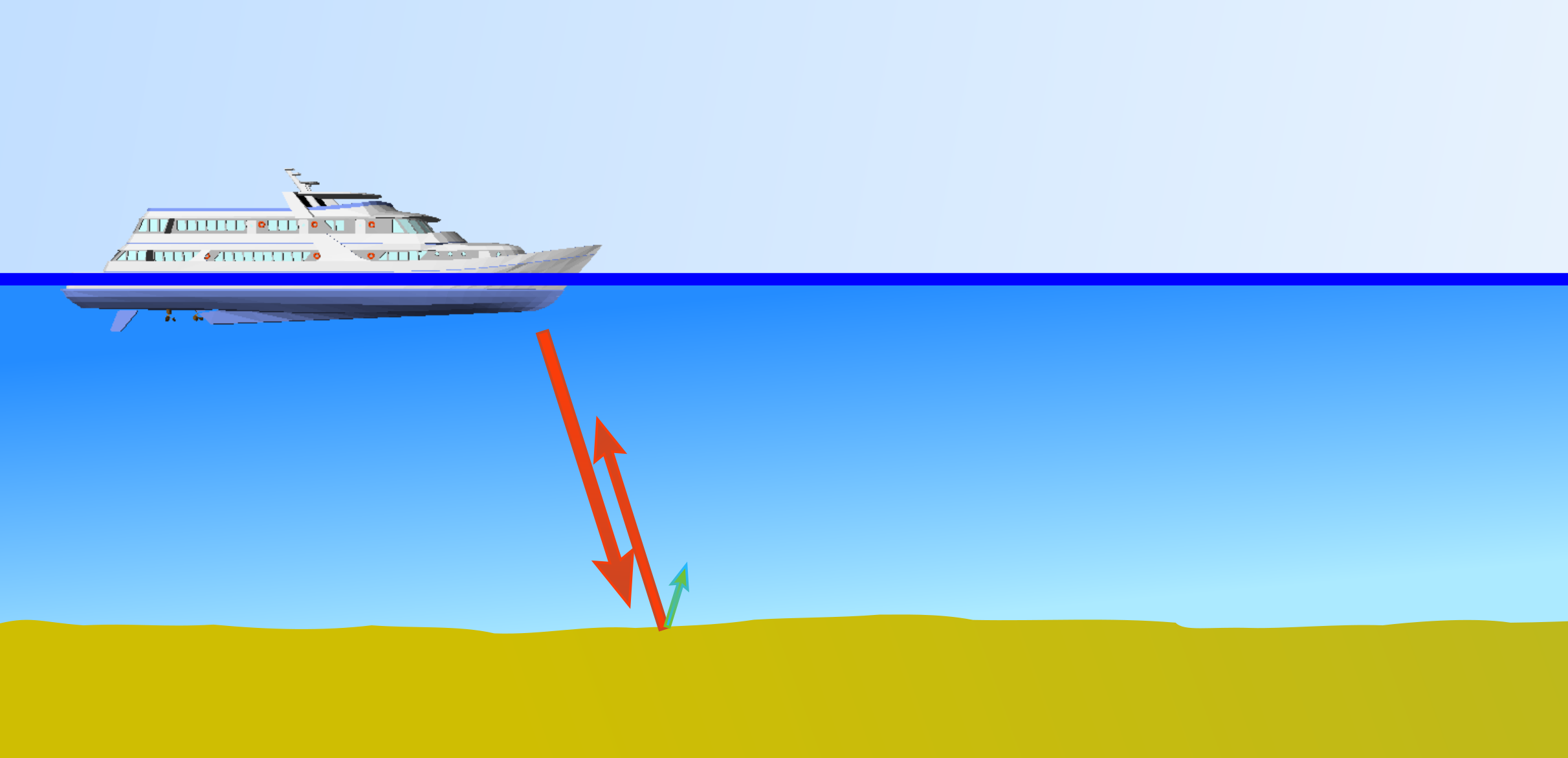
At steep angles, though some energy is deflected forward (green arrow), the majority is reflected back towards the receiver (red arrow)
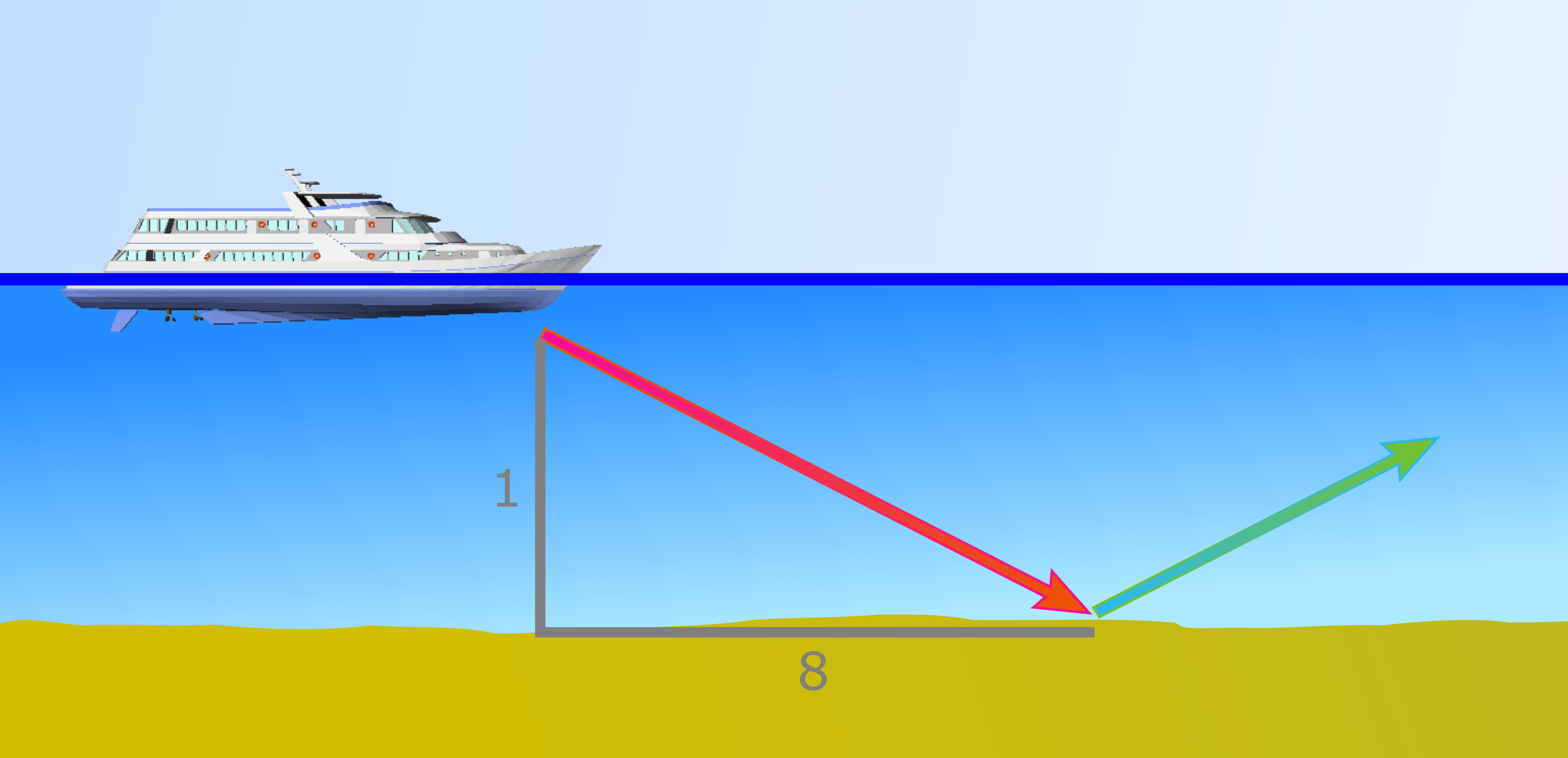
At shallow return angles, the majority of the energy is reflected forward, with very little returning to the receiver. This defines the water depth limit.
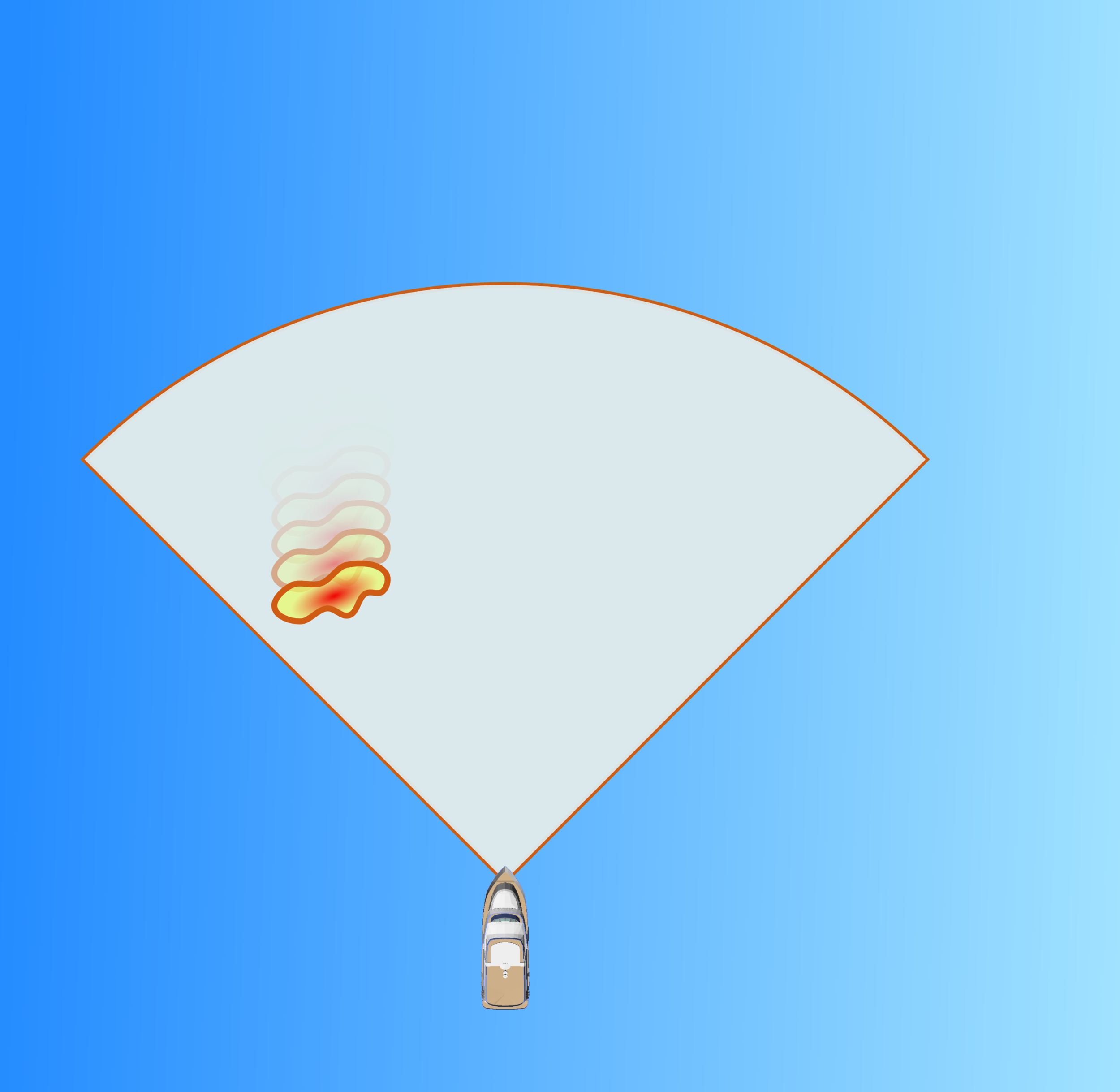
In shallow water environments, an Argos system can map the seafloor ahead of the vessel to 8x the depth of water below the transducer. This is called the sonar’s water depth limit. It is a limit on a sonar’s bottom mapping range. An overview of the physics behind this limit to seafloor mapping ahead of the vessel is given in another post. In short, at shallow return angles between the seafloor and the sonar, less of the transmitted signal comes back (more signal reflects forward).
Beyond this angle, it is difficult for the detection algorithms in SonaSoft™ to make clear detections on the seafloor. The range where this angle starts to become too shallow turns out to be about 8x the depth of the water.
That covers the maximum ranges at which both in-water targets and the seafloor can be detected, but what is the maximum bottom mapping depth?
Shallow Water Bottom Detection ( < 50 meters)
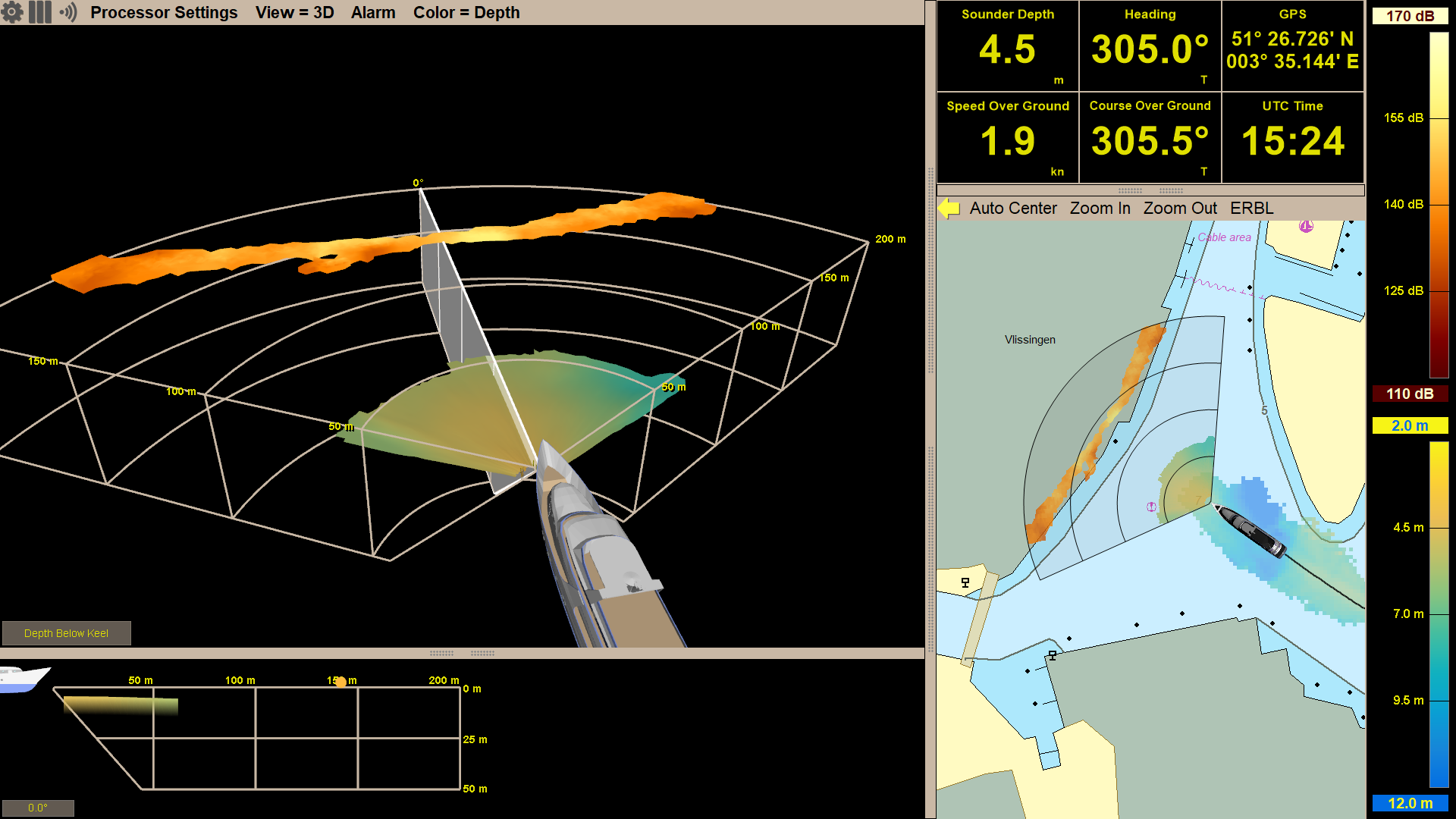
To cover the entire field of view in front of the vessel, the Argos system “looks” up the surface at an angle of about 10° and down towards the seafloor at an angle of about 50°. In shallow waters, the seafloor is close to the sonar, so the transmitted signal has a shorter distance to cover. The transmitted signal goes from the sonar to the seafloor and comes back with little attenuation, so the signal to noise ratio is high and the seafloor is detected effectively by SonaSoft™. In general, the shallower the water, the higher the threat to safe navigation. As the water becomes deeper, that signal has a longer distance to cover - and as it does more energy is dissipated.
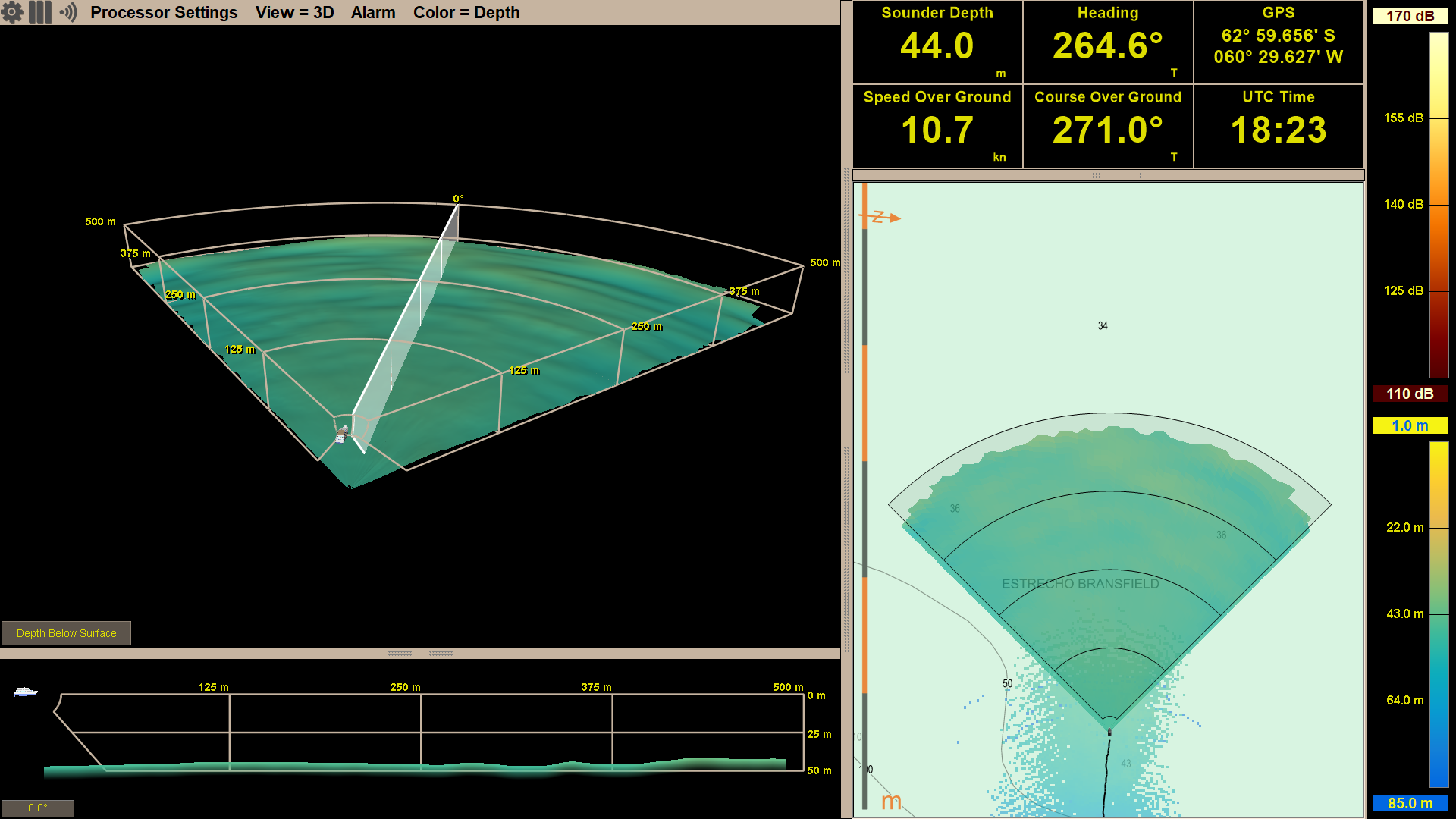
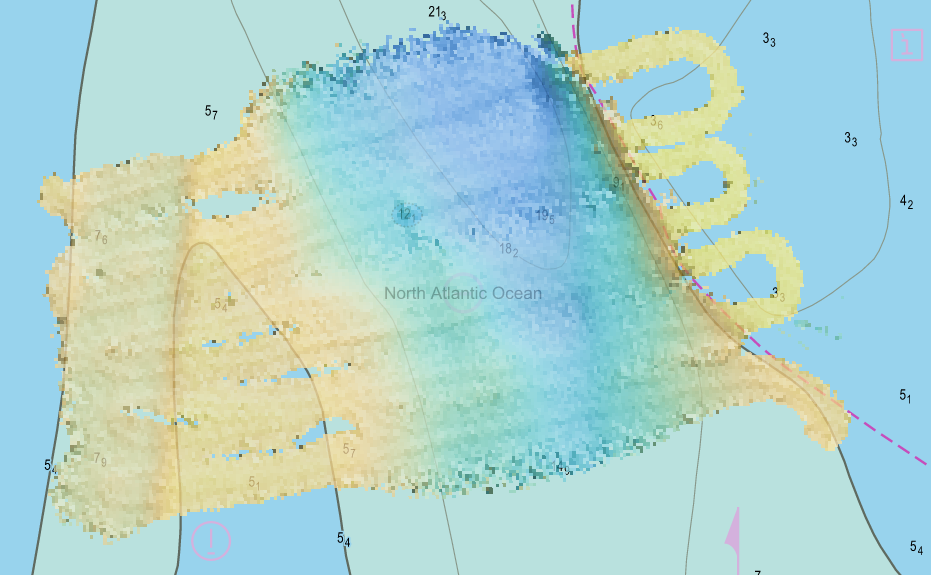
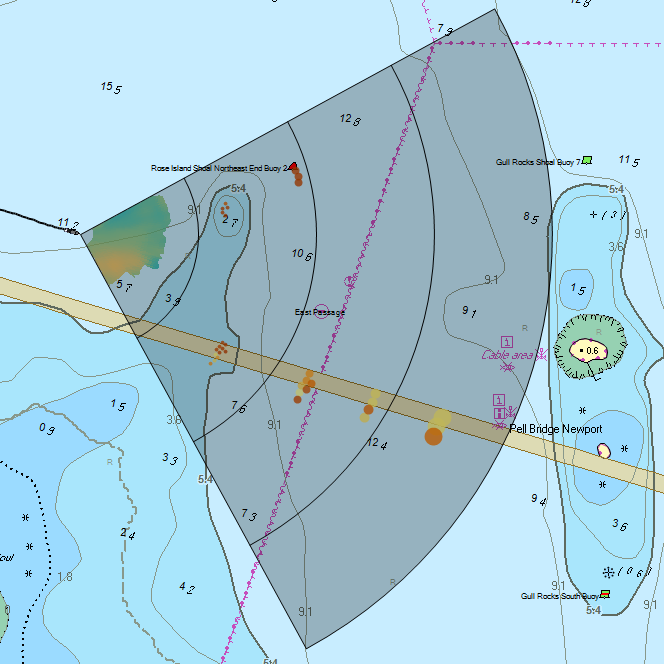
Bottom detections with an Argos 500 in about 44 meters (144 feet) of water. The bottom mapping range in this case is more than that specified 8x water depth (~11x water depth).
Argos sonars are designed for obstacle avoidance and as such, their energy is focused on the upper regions of the water column. FarSounder has designed these systems so that the signal is strong enough that in normal conditions a bottom mapping range of 8x the depth is obtained when the depth is less than 50 meters.
Deep Water Bottom Detection ( > 50 meters)
When operating in deeper waters, the signal to noise ratio of the seafloor is high enough for the seafloor to be detected at steep angles, but becomes weaker and weaker at shallower angles, as it has a longer distance to travel.
Of course even though the current systems were designed to achieve a 8x depth bottom mapping range in up to 50m of water, at steeper angles the bottom can be detected to depths greater than 50m. The limit on bottom detection depth in SonaSoft™ is 85 meters. This limit has been introduced primarily for display purposes.
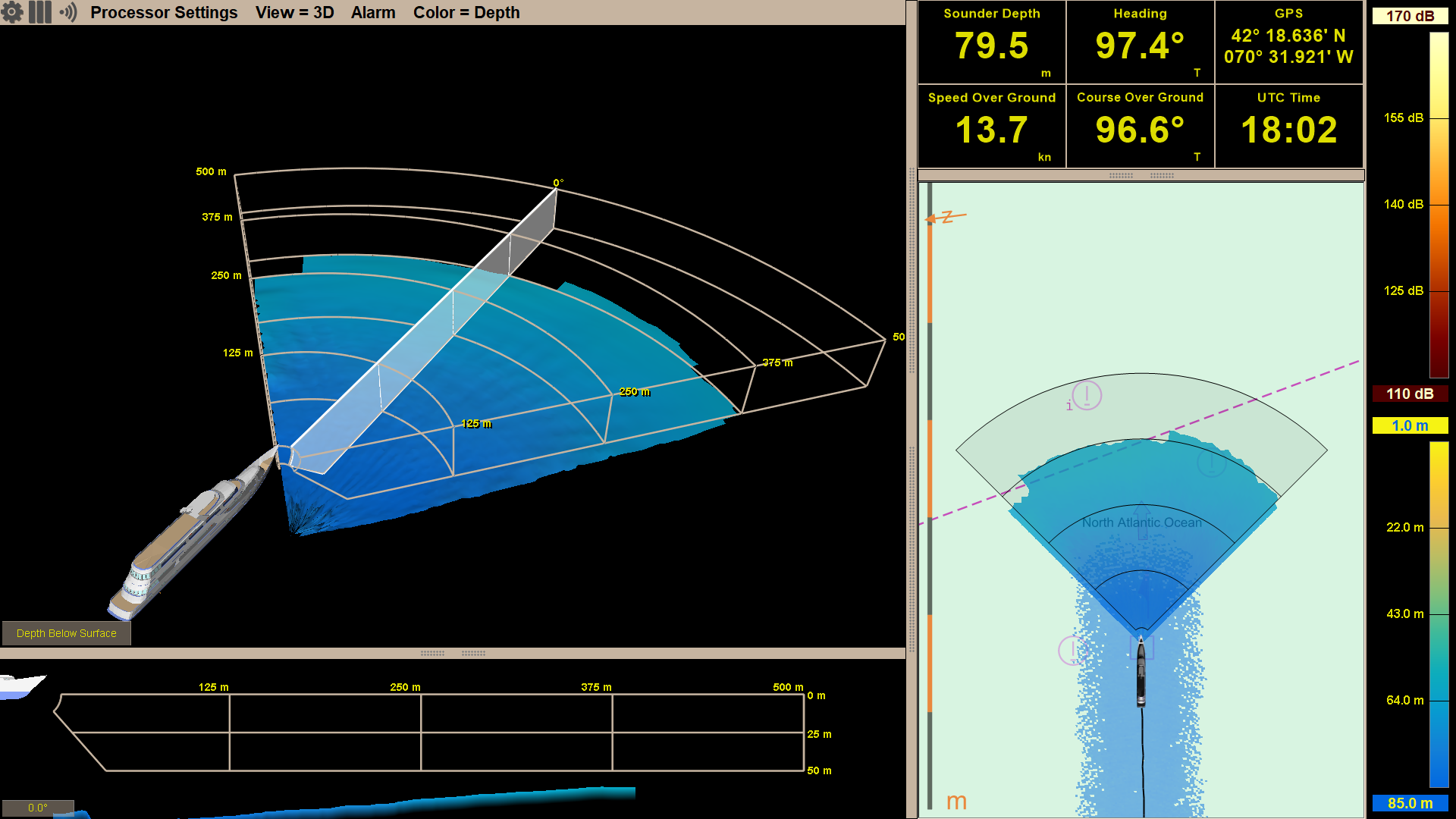
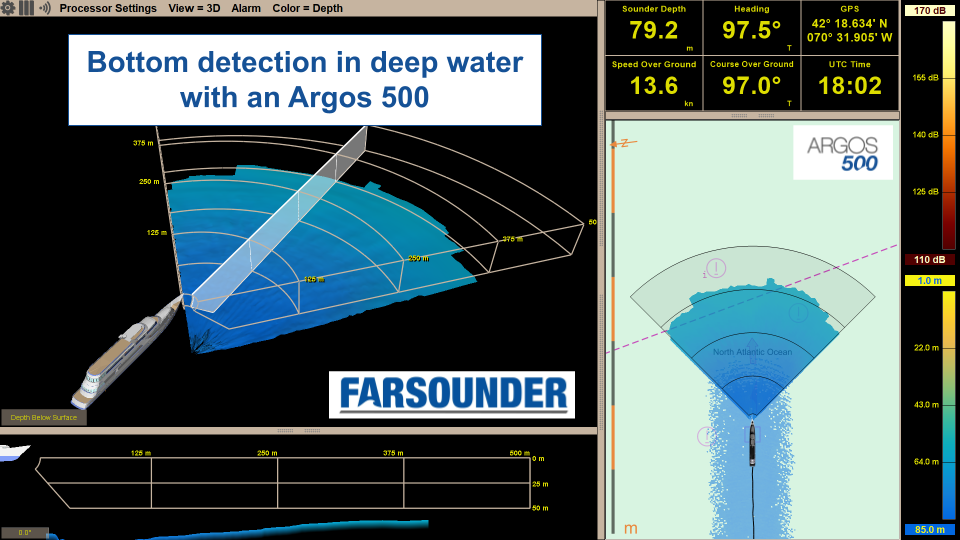
Bottom detections with an Argos sonar in ~ 80 meters (263 feet) of water. The bottom mapping range in this example is about 4.7x depth.
Conclusion
When operating in water deeper than 50 meters, a bottom mapping range of 8x depth may not be achieved. This is because the signal to noise ratio is lower with increased round trip distance between the Transducer and the seafloor, especially at shallow angles. However, bottom detections at steeper angles will be observed down to 85 meters. The range of bottoms in this regime will typically be less than 8x the depth below the Transducer Module. However in certain situations with low noise or high signal reflectivity, full 8x bottom mapping range may be achieved even in deep water environments.