Advantages of Array Processing Over Scanning Sonar

Navigation Sonar Coverage Zone
When considering a sonar product for use in navigation, it is important to consider a number of parameters and system characteristics. Obviously, the ability to look ahead is important. However, "where", "how", and "when" the sonar looks ahead are characteristics that will determine if a particular sonar is suitable for navigation and practical obstacle avoidance. A sonar's overall system design impacts these characteristics significantly. Scanning sonars are one of the most common system designs for advanced sonar solutions as they are relatively inexpensive and relatively small. This makes them a good solution for many applications. Unfortunately, real-time navigation is not one of them. This blog post illustrates the advantage of phased array processing sonars over scanning sonars for navigation applications.
Scanning Sonar Coverage Zone
The first figure at right shows an example coverage zone for a forward facing sonar. The footprint covers a navigationally significant range and provides enough angular coverage to provide the vessel operator information about what obstacles are in the path ahead of the ship. Side note: Angular coverage requirements are generally a function of range - less coverage is needed as range increases.
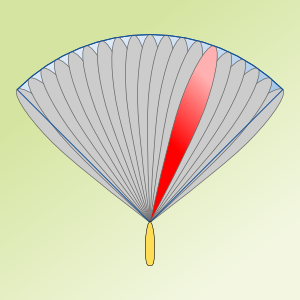
Scanning Sonars
Scanning sonars generally have a single transducer that is used for both transmit and receive. When these sonars ping, they generate a single beam (i.e. sound focused in a single direction). When receiving the echoes, these systems are able to produce a single "line" of returns along the direction the beam is pointing. In order to fill the entire coverage zone, scanning sonars must perform a complete transmit and receive cycle in every direction they wish to look. They do not offer a complete picture until all the angles have been processed. These types of sonars work underwater much the same way as radars do above the water. The second figure on the right illustrates this concept. The coverage zone is filled with multiple beams produced by multiple transmit/receive cycles. The red beam represents the information collected from a single beam in single direction from a single transmit/receive cycle. After each cycle, the sonar points to a different direction and repeates the process. Eventually, after many pings, the system can scan the entire volume of interest and produce a complete image of the coverage zone.
Phased Array Sonars
FarSounder sonars use phased array processing. This system design uses a wide transmission beam to fill the entire volume of interest ahead of the vessel with sound while using an array of receiver elements to listen in all directions within the volume at the same time. This system design is able to generate an entire 3D image with a single ping. Depending upon the model, FarSounder sonars could have hundreds of transducer elements in their receiver arrays. All these transducer elements along with the transmitter are packed into the Transducer Module's array face and encapsulated in urethane. Inside the Transducer Module housing is all the receiver electronics for the receive array.
Real World Advantages
One big advantage of array processing is that the entire volume of interest can be covered with a single transmit/receive cycle. In FarSounder's FS-3DT product, the software produces approximately 2,400 beams pointing to 2,400 separate angles (~61 horizontal angles by 41 vertical angles) with a single ping. By looking in both vertical and horizontal directions, the software can generate a 3-dimensional image. Standard scanning sonars only operate in one angular axis at a time. So to cover the same horizontal vield-of-view with equivalent beam spacing would require 61 pings. Not to mention, the resulting data would only be suitable for a 2-dimensional image. To produce an equivalent 3-dimensional image ~2,400 pings would be required!
So, what's the big deal about multiple pings? As stated before, scanning sonars are similar to underwater radars. Radar signals travel at the speed of light. Therefore, multiple radar transmissions are not a big deal and not really limited by radar propogation time. Unfortunately, the speed of sound in water is only about 1,500 meters/second (roughly 5,000 feet/second).
In order to make the math work out nicely, let's assume that we have sonars operating with a coverage range of 750 meters and use 60 look directions. Then it takes about 1 second for the sound to make the 1,500 meter round trip (750 meters out, 750 meters back). The phased array sonar can cover this with a single ping and can generate a 3D image with about two seconds of digital processing. The scanning sonar covers this with 60 pings and consequentially takes 1 minute (60 seconds) to cover the same area but can only produce a 2D image. Look here for more discussion of 2D versus 3D sonar processing.
From the navigation point of view, 60 seconds (plus sonar processing time) for a single image ahead of the vessel is too slow for practical use. Phased array technology has the clear advantage in any application where fast update rates over a large volume of interest is required. Underwater Threat Detection is another application with this same requirement. Again, FarSounder's phased array technology is a good match for this application's requirements.
Lastly, a scanning sonar will require some sort of mechanical means of changing its look direction for each ping. Having moving parts in a marine environment means having another mechanism that could potentially fail. FarSounder sonars are without any internally moving parts and are designed to be mounted in a fixed position on the vessel with zero time to deploy.