
Tech Blog
Search our Tech Blog:
A First Look at Expedition Sourced Data
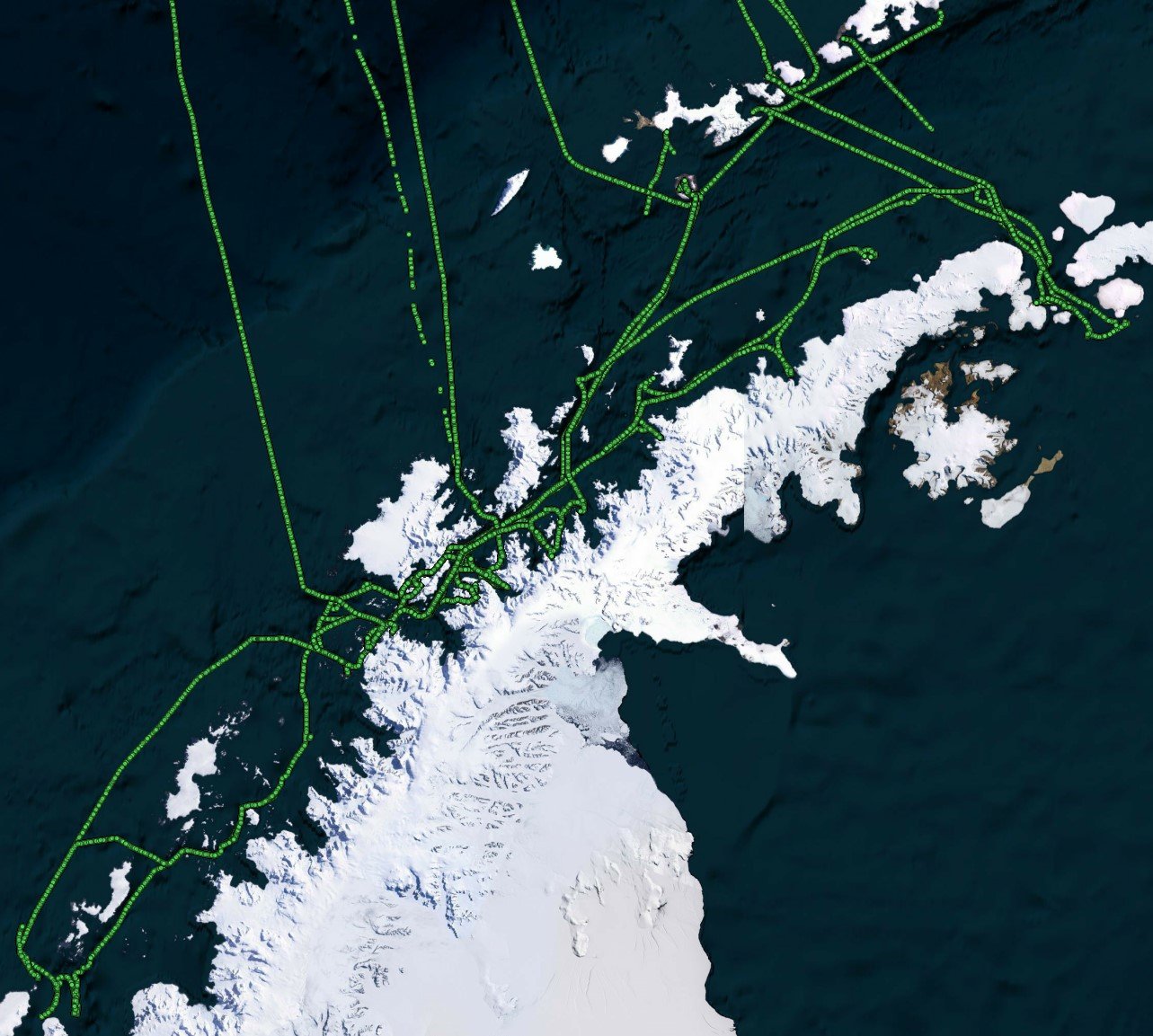
Recently, FarSounder launched an Expedition Sourced Data Collection program allowing customers to record data during their normal operations. We already have a fleet of customers collecting data as they use FarSounder's real-time 3D-FLS to increase safety in their day-to-day operations. Some of the exciting areas they are exploring include the arctic and antarctic waters, as well as the Caribbean.
Expedition Sourced Ocean Data Program: Surveying the Seafloor
The world’s oceans and the environments they encompass are vast and varied. The bathymetric contours and acoustic conditions found in the seas, oceans, and bays throughout the latitudes mirror this complexity. FarSounder sonars are designed to bring clarity in these varying conditions to the operators aboard our customers’ ships. Over the years, we’ve amassed many terabytes of sonar data from vessels and locations around the world with varying times of year, installation types, vessel speeds, and signal types. This data is used to continually test new software releases and algorithms.
Deep Learning in Shallow Water
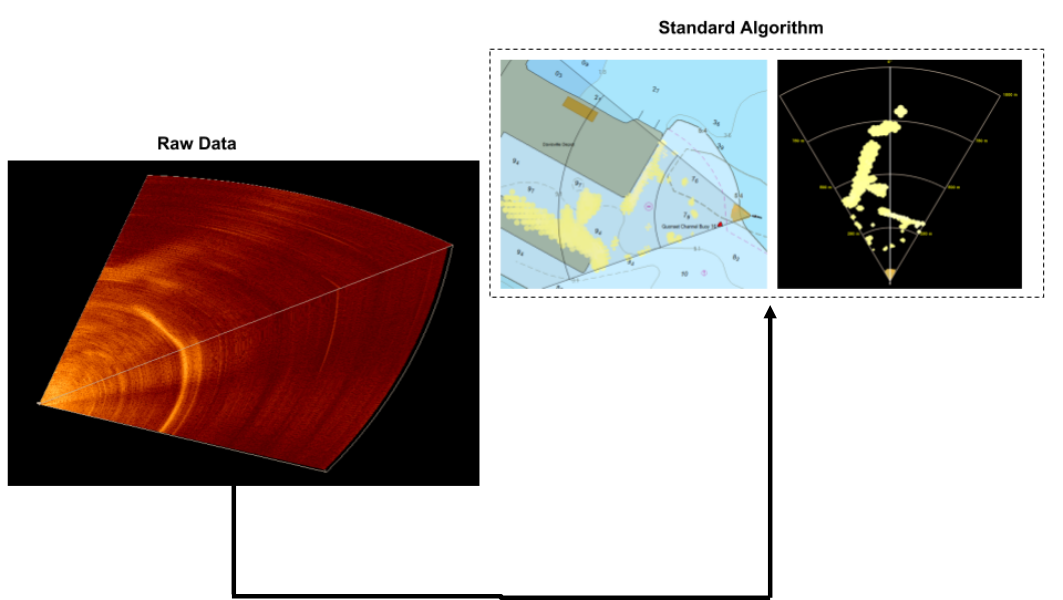
Convolutional neural network (CNN) models have grown in popularity in recent years by demonstrating impressive performance in many fields. These models have been applied to complex problems in many domains. Given the added performance and flexibility offered by these models, we had to ask: “Can we incorporate a CNN based model into our current processing algorithm?”

Electronics Enhancements
FarSounder sonars use a sophisticated data acquisition system to digitize underwater acoustic signals. These custom electronics are designed in-house and are one of the reasons 3D forward looking sonar is possible today. Recently, the electronics in our Transducer Module underwent a major refresh bringing some of the latest technology to our products; one of the ways FarSounder is always looking ahead.
Collecting Bathymetric Data using a 3D Forward Looking Sonar
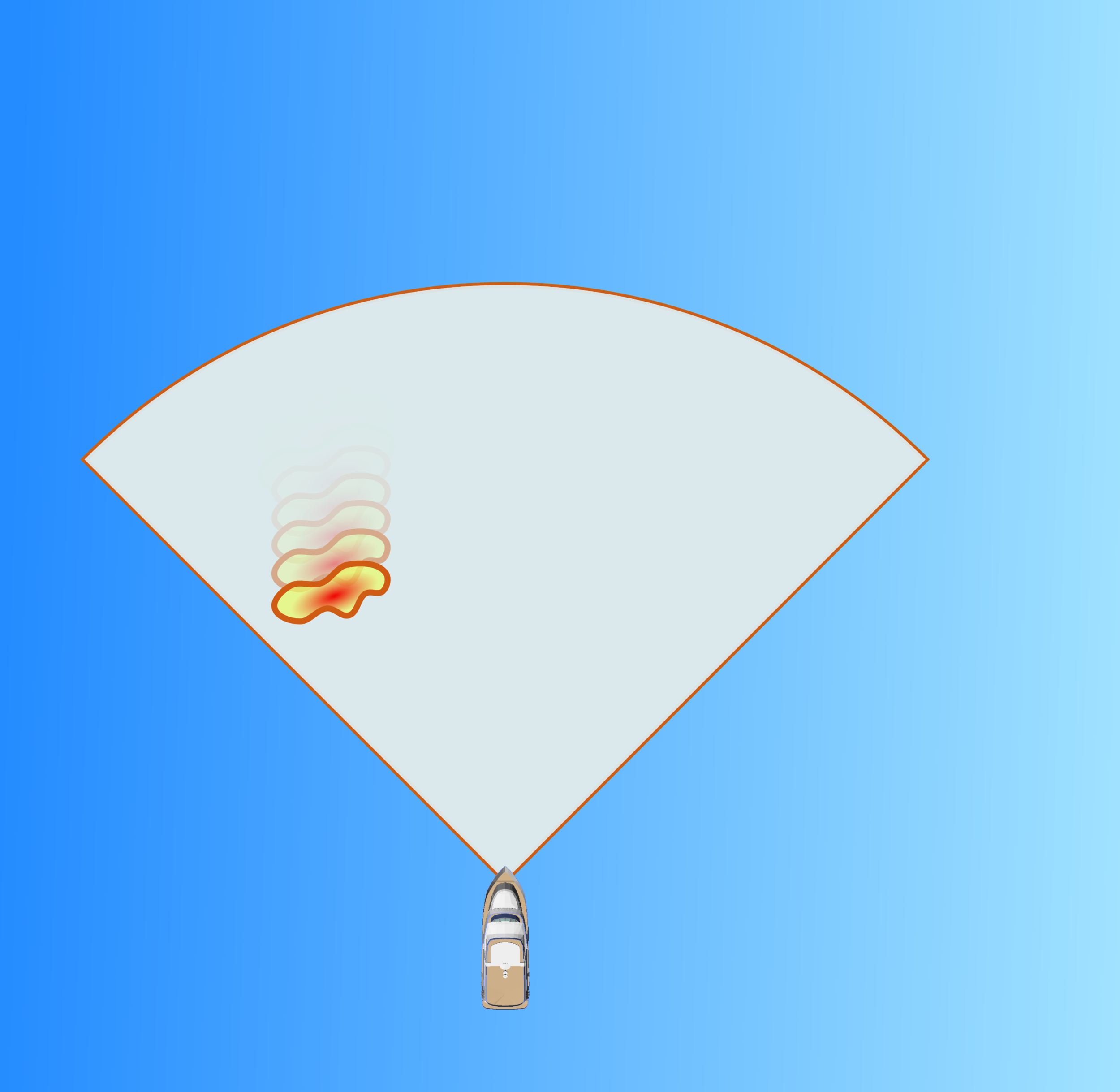
Over the past 14 years, the use of 3 dimensional forward looking sonar (3D FLS) for real-time navigation has been adopted globally by a growing number of vessel operators. FarSounder’s 3D FLS technology insonifies the area (the sonar’s field of view) ahead of the vessel (up to 1000m) and allows navigators to determine not only the range and bearing to navigational hazards within the field of view, but also their depth in the water column. In addition to real-time information about navigational hazards, the depth of water ahead of the vessel is also obtained. Determining the depth of the seafloor ahead of the vessel as measured by a 3D FLS is useful for real-time navigation, but are there other applications for this data?

Applications of Today’s 3D Forward Looking Sonar (OCEANS17)
Abstract: Currently, the main application of commercially available three-dimensional forward looking sonar (3D FLS) technology is for real-time vessel navigation. Using 3D FLS technology, the vessel operator can detect not only the range and bearing to a navigational hazard, but also the depth of the hazard in the water column. However, 3D FLS is itself a nascent technology for which many exciting applications are yet to be realized. In this work, the current applications of 3D FLS are surveyed, and some useful metrics for the evaluation of a 3D FLS are defined. New possible applications of 3D FLS are introduced. Performance for all known commercially available 3D FLS products according the FLS metrics previously defined is summarized. Finally, some of the differences in applicability for current and emerging applications of the most robust 3D FLS systems are discussed.
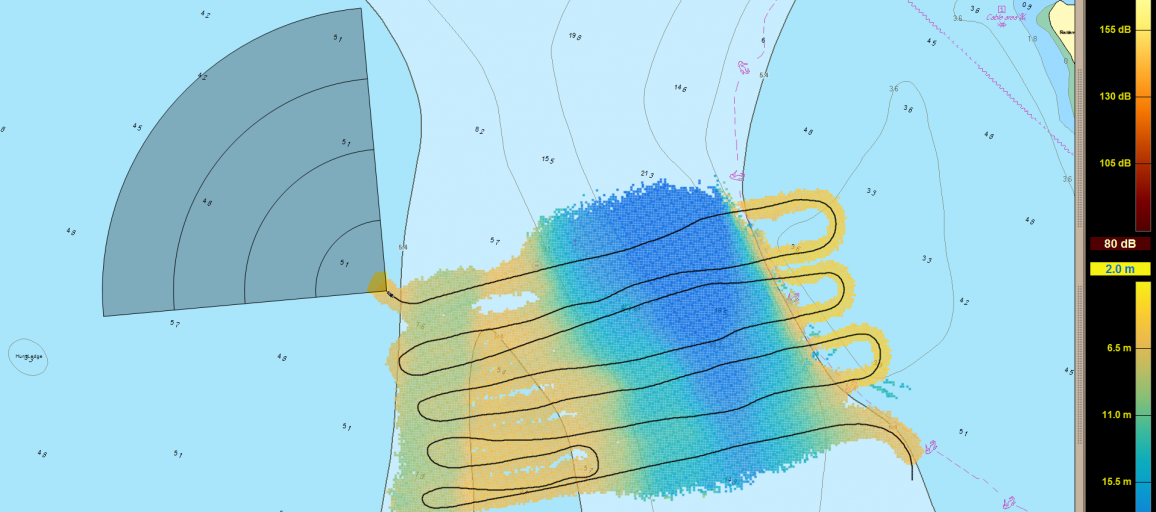
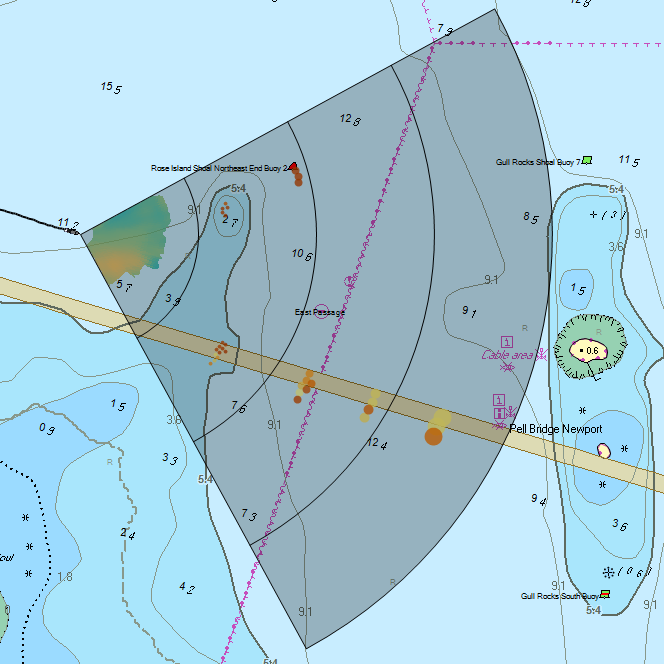
Performance of 3D Forward Looking Sonar for Bathymetric Survey (OCEANS17)
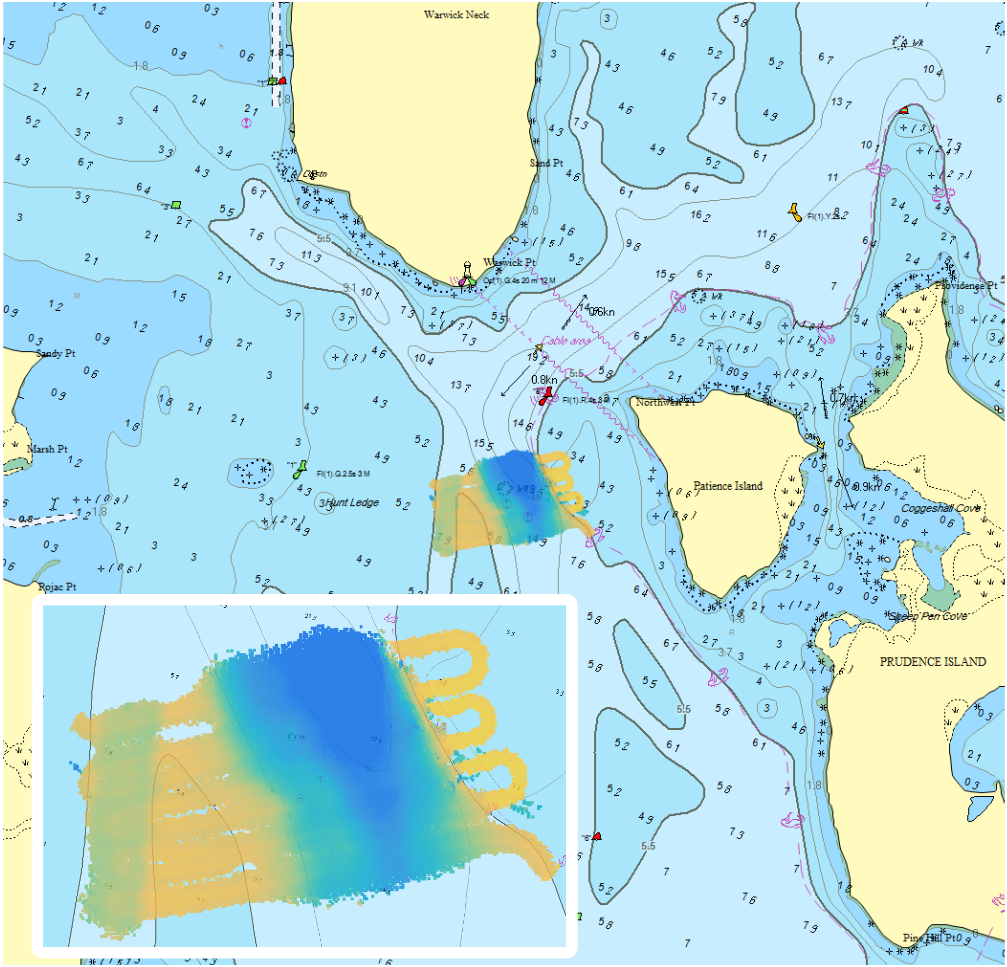
Abstract: Over the past 13 years, the use of 3-dimensionalforward-looking sonar (3D FLS) for real-time navigation has been adopted globally by a growing number of vessel operators. More recently, FarSounder started collecting bathymetric data using 3D FLS sonars in Forward Looking Multi-beam (FLMB) mode. Before exploring all of the possible applications of collecting bathymetric data on vessels with an installed 3D FLS navigation system, the accuracy and limitations of this data should first be understood. In this paper, results from two small surveys using a FarSounder 3D FLS in FLMB mode are presented and analyzed. The survey depths are corrected for tide height and compared to NOAA survey data. The average absolute error in depth is found to be 6.6 and 2.2% in the Patience Island and Newport Bridge survey area, respectively. Further, the average survey swath width is computed from the data recorded as ~9 water depths at ~6 knots.
Hotkey Support for Custom Controls, Foil Panels, and Touch Screens
Integration flexibility is one of the key aspects to FarSounder’s software. Since SonaSoft 3.0, all end user features can be controlled with only a 2 button mouse/trackball and the design of the user interface facilitates the use of touch screen monitors. We also offer low level integration via a network based SDK.
Local History Mapping™ with Forward Looking Sonar
To date, FarSounder’s 3D FLS products have operated purely as real time navigation and obstacle avoidance sonars. Our user interface software includes an overlay of the real time sonar imagery on top of a standard nautical chart. However, since the early days of our development, we have always believed that storing the sonar data and building a bathymetric history would be a valuable capability. Some years ago, we started developing our first Forward Looking Multibeam (FLMB) proof-of-concept. Today we are excited to announce that starting with SonaSoft 3.3, Local History Mapping™ will be included as a standard feature.
What to Expect From Your 3D Forward Looking Sonar
FarSounder forward looking navigation sonars are unlike any other sonar on the market. Our sonars generate a complete 3D image ahead of the vessel at navigationally significant ranges with each and every ping. Because our technology differs from all other sonar products, we try to be very straightforward and clear about what our products can and cannot do. The purpose of this posting is to highlight the unique capabilities that users can expect from our navigation products as well as outline the general installation and interfacing requirements.

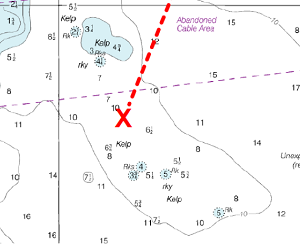
New Navigation Techniques for Arctic Exploration
In today’s world of instant communications, constant connectivity, and virtual reality, it is easy to forget that there are still vast expanses of our world that are undiscovered and unknown. Polar regions make up much of that vast unknown. Yet in the past few years, the number of vessel excursions into these areas is increasing steeply. Shipping, tourism, oil exploration, science, and EEZ expansion are all driving this surge. With this surge comes increased risk of navigational hazards as many of the “classic” navigation tools (recent surveys, stable buoys and channel markers, and good gps coverage) are not available or practical in these areas.
Vector Data Extraction from Forward-Looking Sonar Imagery for Hydrographic Survey and Hazard to Navigation Detection
Abstract - This paper describes research to determine the effectiveness of forward-looking sonar as a means to safely navigate vessels in frontiers such as the Arctic and other regions that may be lacking recent or comprehensive hydrographic survey. Key elements of this investigation include the range at which valid measurements may be taken, uncertainty in measurement, confidence level of the measured value and resolution available to detect underwater hazards affixed to the bottom and suspended within the water column to provide time sufficient to enable the crew to take action to alter course and/or speed to avoid casualty. An additional factor involves examining forward-looking sonar measurements as a means to survey shallow sea bottom where hydrography data does not exist or is not accurate, potentially offering a valuable resource to supplement scarce national hydrographic office assets to accomplish this task. An assessment of viability is also made regarding compliance with the International Hydrographic Organization (IHO) standards for hydrographic surveys that form the basis for soundings that appear on navigation charts.

Integrating FarSounder Navigation Sonars into Wärtsilä NACOS
We recently announced the integration of our navigation sonars into the newest Wärtsilä SAM Electronics NACOS Platinum Integrated Bridge System. Now that the first of these integrated systems has been installed for a customer, we’d like to share some more details about how we fit into their system.
Introducing True Target Motion™ for 3D Navigation Sonar
Improving the situational awareness of obstacles below the sea surface is the reason we developed our 3D forward looking sonars. True Target Motion™ is our latest innovation for improving upon that awareness. This new software feature combines inputs from the ship’s heading and GPS sensors with our navigation sonar data to animate the movement of detected sonar targets relative to the vessel between each ping. Without True Target Motion™ the position of each sonar target can only be updated once every ping. Now, target positions are updated as the vessel moves between pings.
Eyes in the Back of Your Head - Introducing Dual Navigation Sonar
Forward looking sonars significantly add to a ship's situational awareness when moving forward. But what about when the vessel is moving astern? With more and more yachts, workboats, expedition class passenger vessels, and arctic explorers being outfit with azimuth thrusters and advanced DP, larger vessels are finding their way into tight places with a need to back up. If you need an obstacle avoidance sonar to make your way in, sometimes you need one to make your way out - especially with the reduced situational awareness of the bridge facing forward and the vessel running astern.
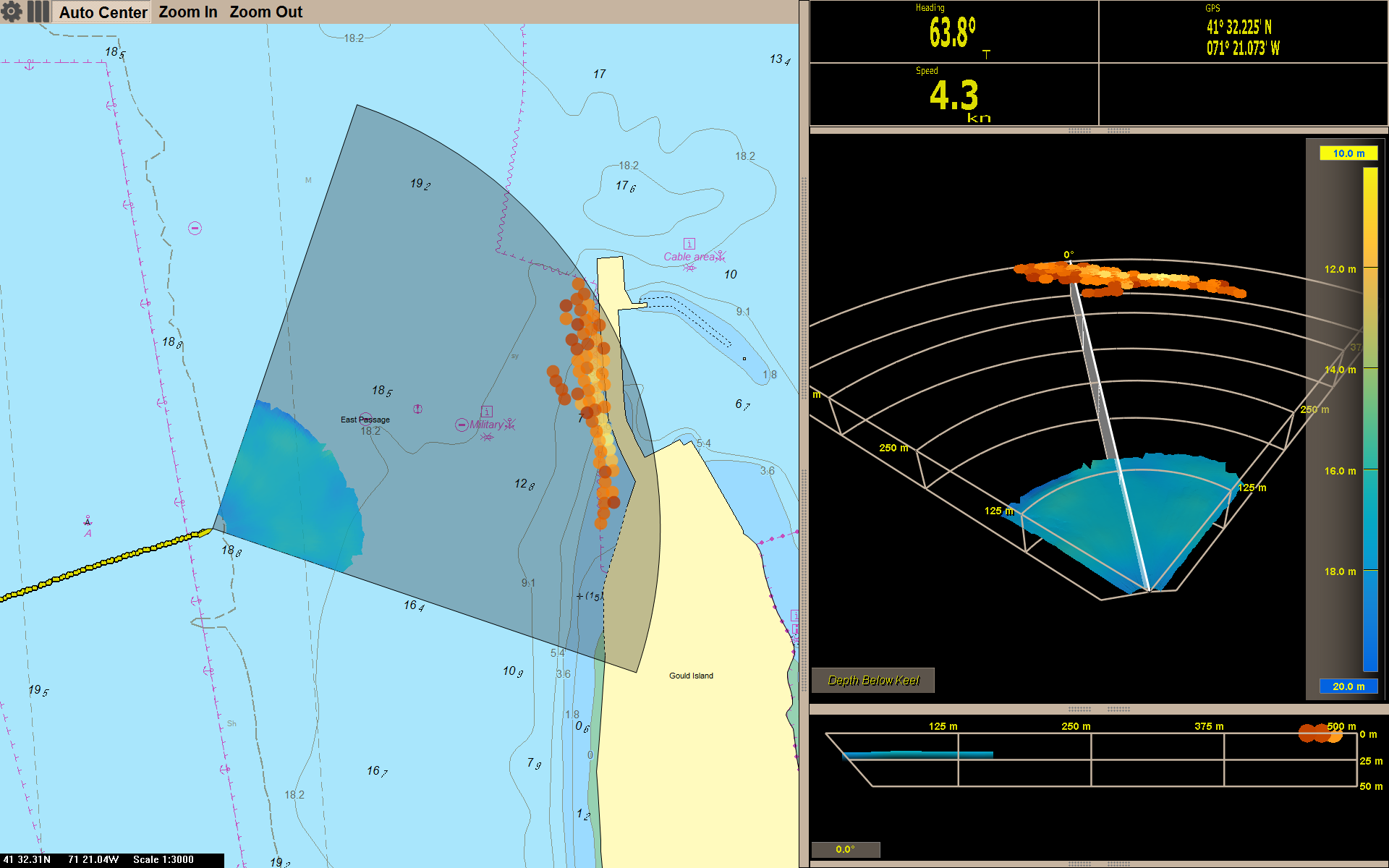
Seeing the Big Picture: Expanded Chart Overlay
Early in FarSounder’s development, we added a raster chart display to help our engineers correlate what we saw in the sonar display with what was in the real world. The raster chart display evolved to a vector chart display. Soon after that, we started displaying in-water targets on top of the chart. Now, with the release of SonaSoft 3.0, our software includes an expanded overlay with the complete 3D sonar image. The seafloor and in-water targets are shown with the same colors as the 3D Sonar Display as an overlay on top of the chart data. Many users will find that the Chart Display will become their primary display rather than the 3D Sonar Display since it shows a more complete situational awareness with both chart and sonar data.

Look Ma, No Hands! Next Generation Sonar Processing
One of the exciting characteristics of our 3D FLS products is that with each release of our software we unleash more and more of the sonar sensor hardware’s full potential. This means that our performance and capabilities will continue to get even better via software updates without requiring new sensor hardware. Over the past year, the FarSounder engineering team has been focusing on improving our automated sonar processing algorithms and image quality. We’re excited to announce our next generation auto-squelch and bottom detection algorithms.

Orange is the New Rainbow: Introducing FarSounder’s New Color Mapping
With the launch of SonaSoft 3.0, we’ve decided to make a paradigm shift in how we display our sonar data. Previously, our software always used a colormap based on jet (a.k.a “rainbow”) for both depth and signal level color mapping. Not only did this prevent displaying depth and signal level information in a single display, the colormap itself was not optimal. We now use two separate colormaps for depth and signal level. A multi-color, uniform luminance gradient colormap is used to indicate depth while an orange-copper colormap is used to indicate signal level.

FarSounder's Acoustic Test Tank Facility
We’ve just completed the finishing touches on a brand new test tank facility in our main office. Our primary motivation for building this new facility was to increase our production productivity, since every sonar unit we produce is tank tested and calibrated before shipment. Our previous tank was located in a warehouse about 3 miles (~5 km) from our offices. Compared to our old tank, the new one is larger, deeper, and WAY more convenient.

Practical Installation Requirements: No Need for Sonar Domes
With a well designed installation, FarSounder sonars have no need for a sonar dome. This blog posting summarizes why domes are sometimes used with other sonar technologies and why our products don’t require them.