Create extraordinary experiences.
3D Forward Looking Sonar to access the most exclusive locations safely.
Advanced Underwater Solutions
Patented 3D sonar technology that reliably detects in-water obstacles and shallows
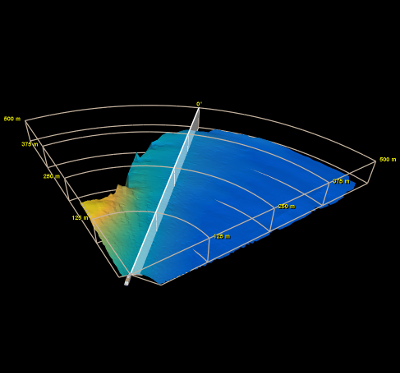
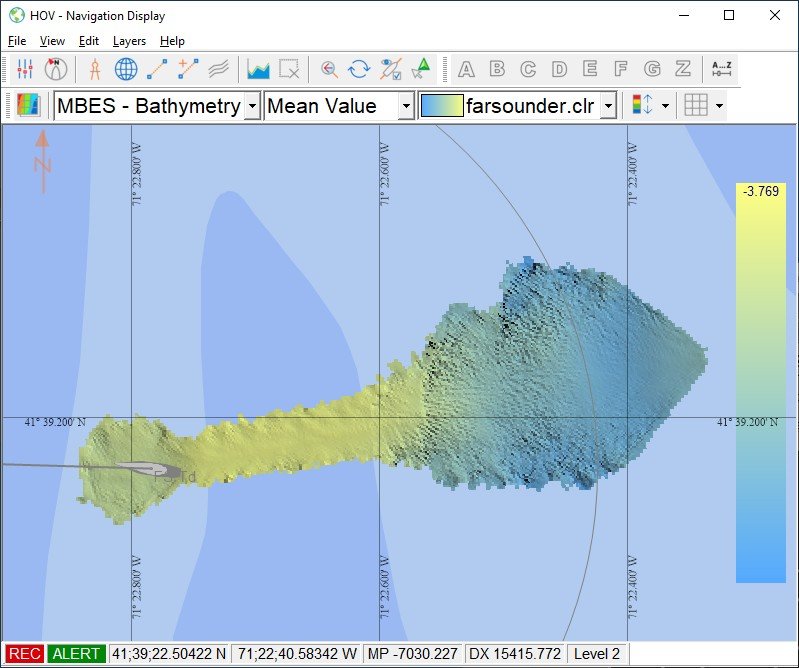
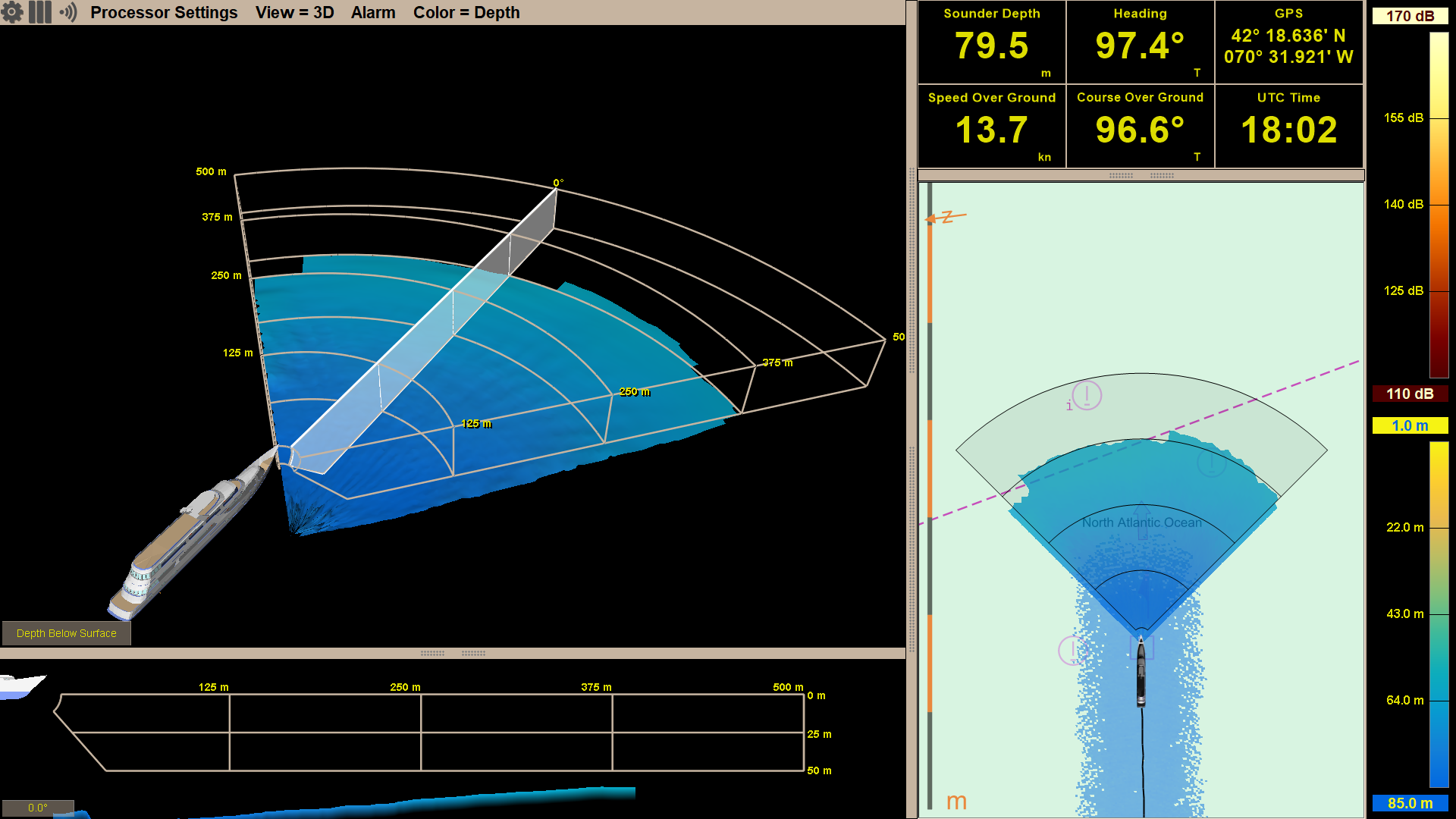
Intuitive 3D Display
3-dimensional image ahead of a vessel at navigationally significant ranges.
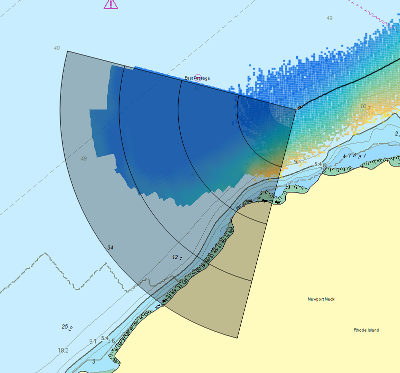
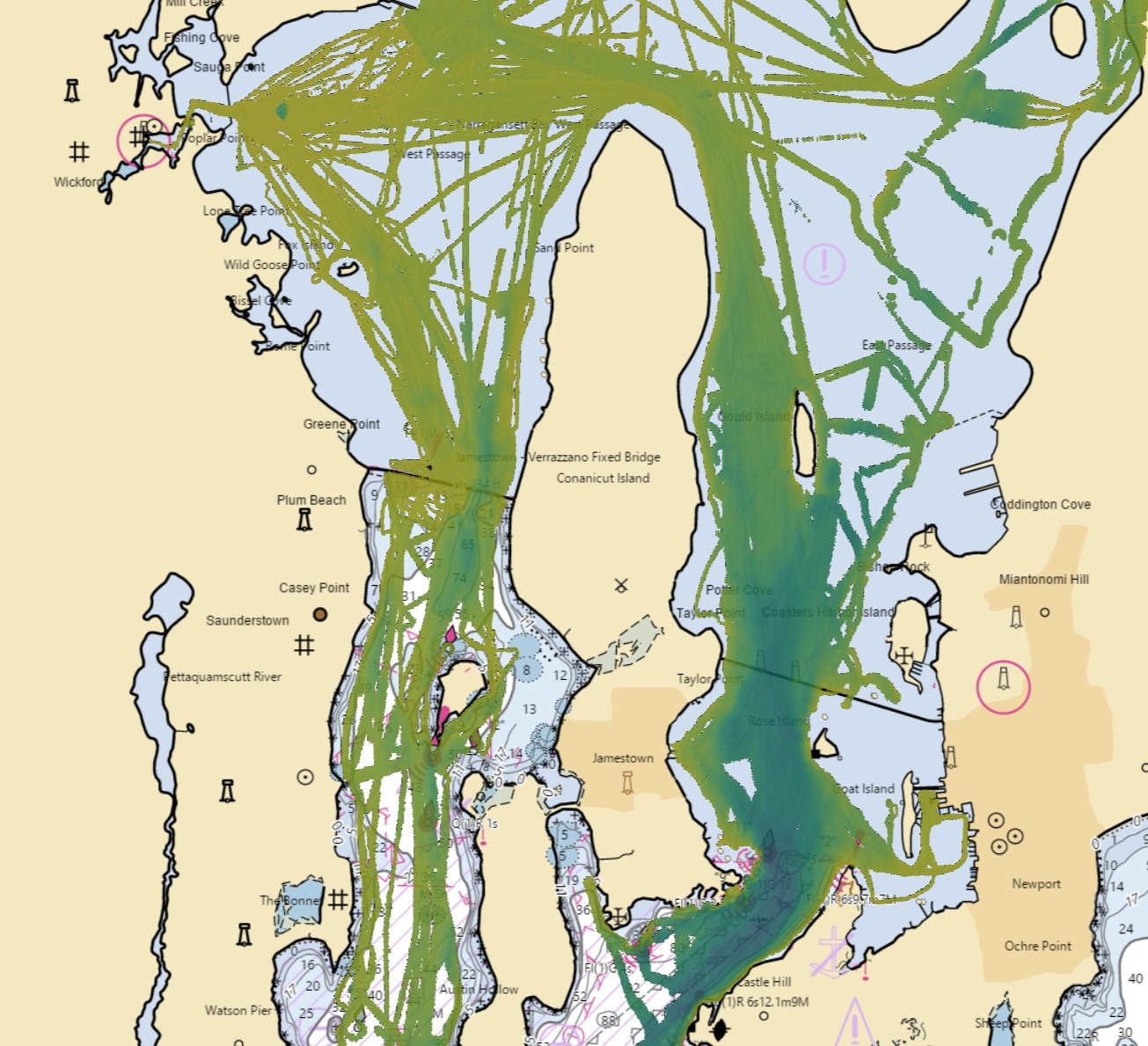
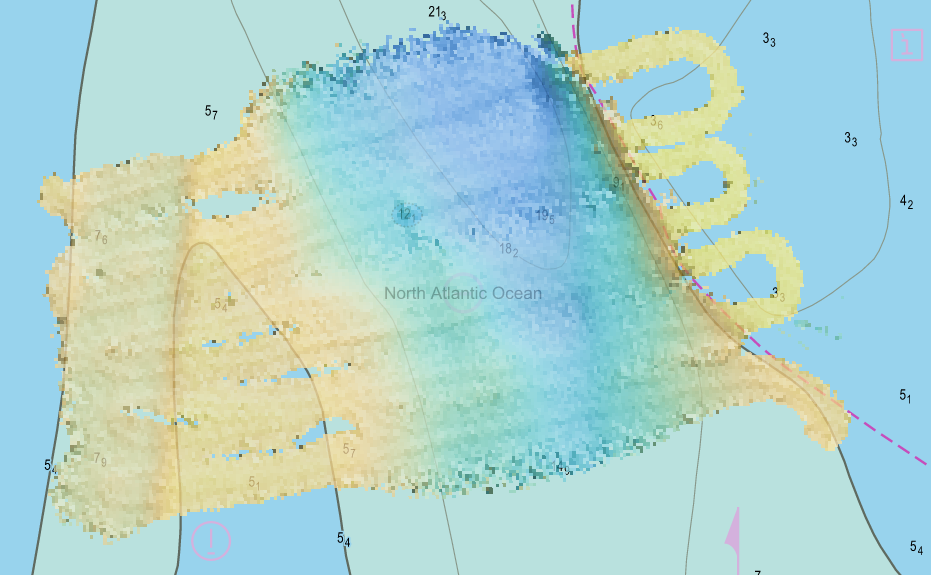
Sonar Over Charts
We paint a clear picture by displaying forward looking sonar data on top of a nautical chart.

Fixed Installation
Our installation design is suitable for vessels with or without a bulb on both refit and new-builds

Rapid Update Rate
Phased array technology enables FarSounder's sonars to generate the entire 3D image with a single ping.
Our Navigation Sonars
Discover the technology behind navigating challenging and uncharted waters

Offering a detection range of up to 350 meters and operating speeds of up to 18 Knots

Offering a detection range of up to 500 meters and operating speeds of up to 20 Knots
Offering a detection range of up to 1000 meters and operating speeds of up to 25 Knots

80+
Dealers
35+
Countries
up to
1000
Meters
up to
25
Knots
Vessels and Applications
FarSounder's products can be used in a variety of applications for obstacle avoidance and shallow water navigation. FarSounder Products are designed to fit many types of vessels including yachts, cruise ships, research survey vessels, defense and government vessels, and fisheries and small commercial vessels