Unmanned Surface Vehicles (USVs)
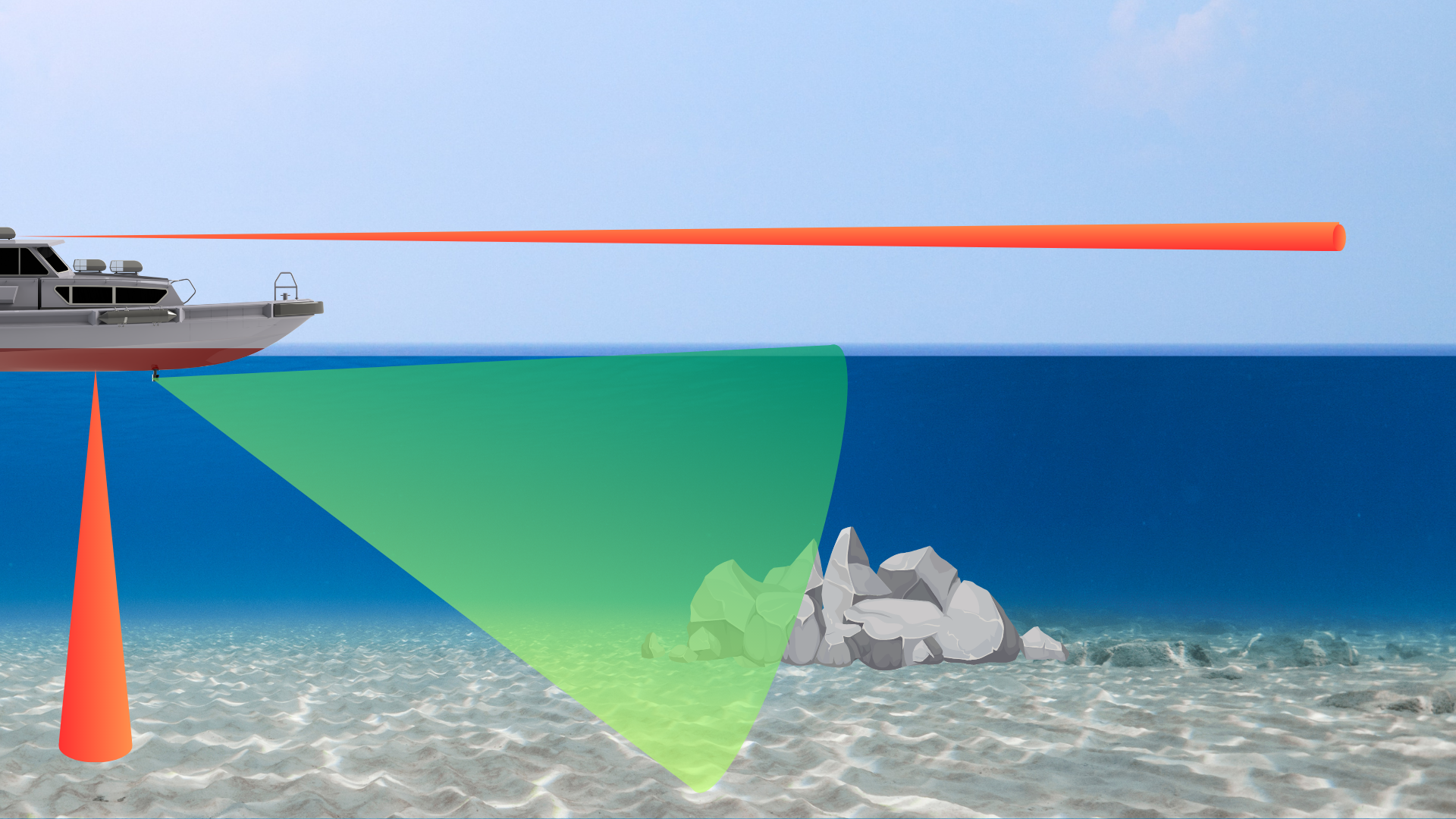
Discover how to increase your USV mission’s ROI by decreasing risk. FarSounder's breakthrough Argos series sonars enable integration with machine interfaces to increase situational awareness. Argos sonars detect in-water obstacles and process a 3D bathymetric view ahead of the USV, with a machine interface for autonomous navigation or integration, and a GUI for human in-the-loop viewing or operation. FarSounder’s 3D FLS systems allow vessels to navigate challenging waters from polar environments to shallow littoral areas. By helping vessels navigate more effectively, the Argos sonar is playing a vital role in expanding USV applications and promoting safer marine environments.

Machine Interface

Argos navigation sonars provide vehicle control systems with reliable, fully processed, real time information. The systems do all the data processing. This provides the vehicle control system with the information needed to make intelligent navigation decisions and make real time course alterations. All Argos Navigation Sonars models have an Ethernet based machine interface. USV developers can access the same fully processed information used in our display software via an SDK.
Data Recording
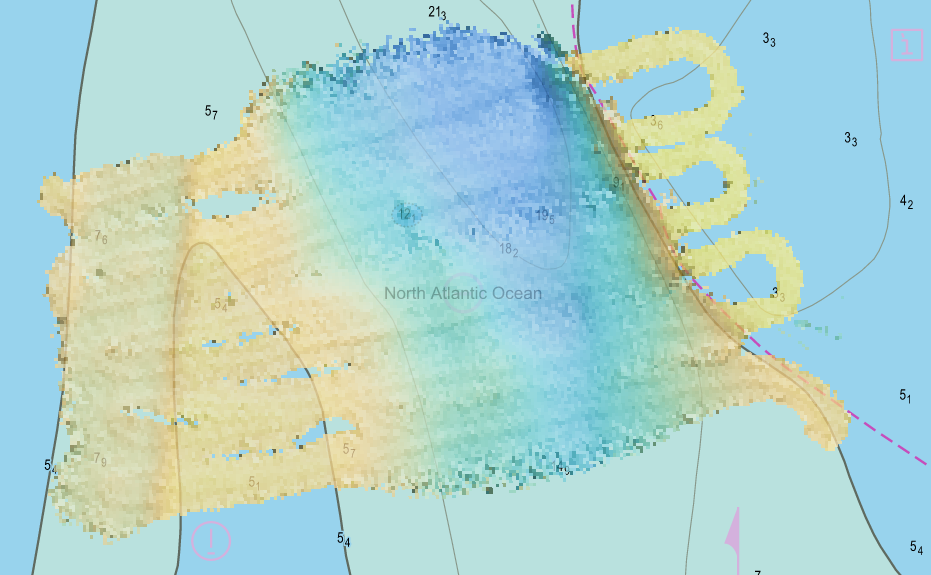
FarSounder’s Argos technology takes the real time information the vehicle has gathered and generates a depth map of everywhere the vehicle has been using the software’s built in Local History Mapping. If there is a need for a complete hydrographic survey experience, connect to the QPS ecosystem via Qinsy.


Human in the Loop Display
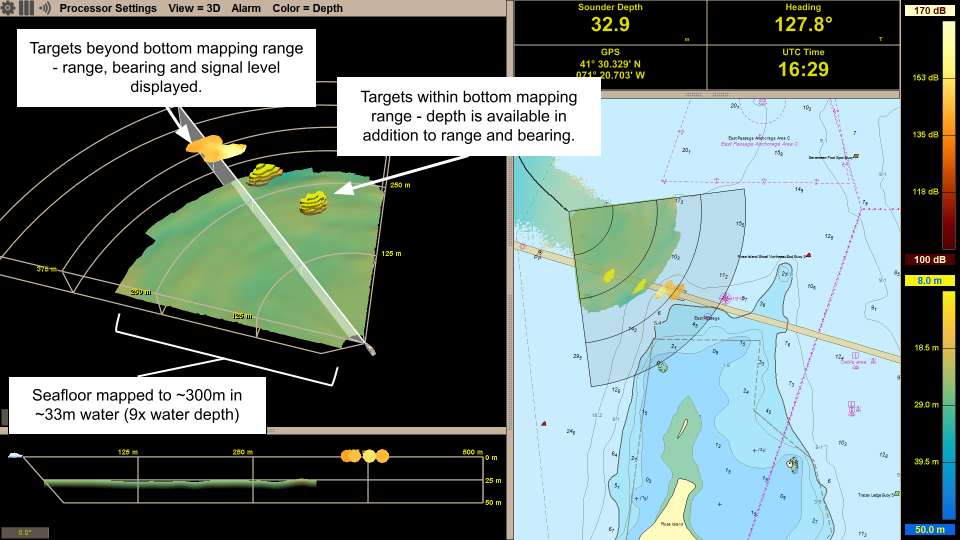
USV missions vary greatly from 100% autonomous to fully remote control. In most cases a human-in-the-loop display is an added value that allows operators a complete visual understanding of what the system “sees” ahead of the vessel. The Argos software’s 3D Omni View and Chart Overlay View provide comprehensive situational awareness with standard nautical charts and AIS/ARPA overlays.
Hoist Deployment for Small USVs
-

Top Mounted Connector Option
For hoist and pole mount installations, the unit can be ordered with its connector on top. The entire assembly is designed to fit within a 10 inch diameter sea chest.
-

Off-the-Shelf Hoist Solutions
Though hoist mechanisms can be sourced locally by the shipyard yard, FarSounder’s partner C4R offers an off-the-shelf system designed specifically for the Argos 350
-

Flush When Retracted
Blind tapped holes on the top of the transducer allow for easy connection to the hoist. Holes on the bottom allow for the installation of a cover-plate which can be flush with the hull when retracted.
Fixed Installation for Larger USVs
-

Robust Array Face
Tough, marine grade urethane encapsulates the transmit and receive arrays.
A stainless steel housing protects the internal electronics against the harsh marine environment.
-

Wet Mateable Connector
An underwater wet mateable connector on the rear of the unit allows for installation and removal by diver while the vessel is afloat.
Minimal maintenance is needed to keep the system working flawlessly.
-

Secure Installation
Twelve mounting bolts secure the unit to the fairing integrated into the vessel’s hull. A fixed installation means no moving parts and is suitable for both new build and refit applications.
FarSounder’s fairing designs are suitable for steel, aluminum, and composite hulls.









USV FAQs:
What Argos model is best for USV applications?
All of FarSounder’s Argos models can be used for USV applications. For USVs under 15m in length, most customers use the Argos 350 and often have the Transducer Module installed on a hoist. Larger platforms generally use an Argos 500 or Argos 1000 depending upon their range requirements.
Where is your software installed?
All FarSounder sonars require a centrlal computer which communicates with the sonar hardware via Ethernet, performs all sonar processing, generates the human-in-the-loop display, and includes the machine interface to the processed sonar information.
Can I have a remote display off vehicle?
Yes. One option is to establish a persistant wireless network connection to your remote operator station and use FarSounder’s standard Thin Client software to replicate the display and control of the sonar. Another option is to use remote desktop software such as VNC or TeamViewer.
Are there any export restrictions on FarSounder’s products?
FarSounder’s sonars are classified as Dual Use products and their export is regulated by the US Department of Commerce. Export licenses are not needed. However, Beneficial End User details are required to be provided to ensure compliance with export regulations.
I have a special USV design. Can FarSounder’s engineers assist in evaluating installation options?
Of course! FarSounder’s engineering team has a long history of supporting installation designs on a wide variety of vessel types. Please contact service@farsounder.com with your specific questions.
What other sensor inputs are required?
For optimal sonar performance, FarSounder’s software requires the following inputs via NMEA: position, speed over ground, heading, course-over-ground, and rate-of-turn. For optimal human-in-the-loop display, echosounder depth, AIS, and ARPA should also be input.
Downloads:
Related Articles: