
News
Search our News:
FarSounder and Tocaro Blue Announce an Integration Delivering Enhanced Marine Navigation
FarSounder has expanded the capabilities of its Argos Forward Looking Navigation Sonar (FLS) with an integration with Tocaro Blue’s ProteusCore™ software. This new integration brings AI-powered Radar perception to FarSounder’s SonaSoft™ Lt navigation software, delivering even greater situational awareness for users navigating challenging marine environments.

FarSounder Celebrates 25 Years of Innovation in Marine Navigation
FarSounder marks its 25th anniversary in 2026, celebrating a quarter-century of advancing marine navigation technology and improving safety at sea. Since its founding, the company has continuously evolved its 3D forward-looking sonar capabilities by learning from real-world operations and responding to customer needs, strengthening its role as an industry leader.
Onboard AI Reshaping Marine Electronics
Marine electronics companies have always sought to make their sensor products effective and user-friendly, but recent years have seen the rise of cross-platform integrations to make this equipment even better and easier to use. These integrations have been unfurling between sensor manufacturers and third-party AI companies, and between companies that build complementary hardware and software. Today, there are many examples of integrations across the marine-electronics space.
FarSounder Awarded Manufacturing Innovation Voucher to Advance AI‑Based Sonar Capabilities
FarSounder, a global leader in 3D Forward Looking Sonar technology, has been awarded a Manufacturing Innovation Voucher by the Rhode Island Commerce Corporation. The award will support advanced research and development focused on integrating automatic target recognition into FarSounder’s end‑user sonar software.

Can Technology Save the Whales?
A 2022 study published in the Marine Ecology Progress Series reported that “low-speed environments, such as speed-restricted zones, vessel-based whale detection systems for strike mitigation could provide a high level of protection for animals.” The authors noted that if a vessel travels less than 9.7 knots, any form of detection system with at least 1,000 meters of range will have a 90% probability of detecting a whale.

Building the Hybrid Fleet: Unmanned Subsurface Awareness for Naval Superiority
Unmanned and autonomous systems are rapidly reshaping naval operations, advancing from experimental to essential. Naval forces across the globe are aggressively pursuing hybrid fleet archetypes merging traditional manned naval operations alongside unmanned surface vessels (USV). In many cases, this integrated dynamic is already being fielded; however, the doctrine for the roles these platforms will play is largely unwritten. Like most USV applications, a crucial area of focus lies on the sensor technology that empowers them to perceive, decide, and act independently across diverse maritime environments.

FarSounder’s Argos 3D Forward Looking Sonar Now Integrated with Anschütz SYNAPSIS (W)ECDIS NX
FarSounder, the leading innovator in 3D forward looking navigation sonar technology, is proud to announce a new integration with Anschütz GmbH’s (W)ECDIS NX navigation platforms. This collaboration brings FarSounder’s real-time underwater detection and seafloor mapping data directly into the SYNAPSIS interface. delivering a unified and intuitive situational awareness experience within a centralized navigation system for mariners worldwide.

The Retirement of Our Remarkable Leader
We are honored to announce the retirement of Cheryl Zimmerman, who has been an integral part of FarSounder’s success and growth. Throughout her more than two-decades-long career as CEO before transitioning to Chairman of the Board and Market Development Strategist at FarSounder, Cheryl has been a role model of leadership, dedication, and professionalism.
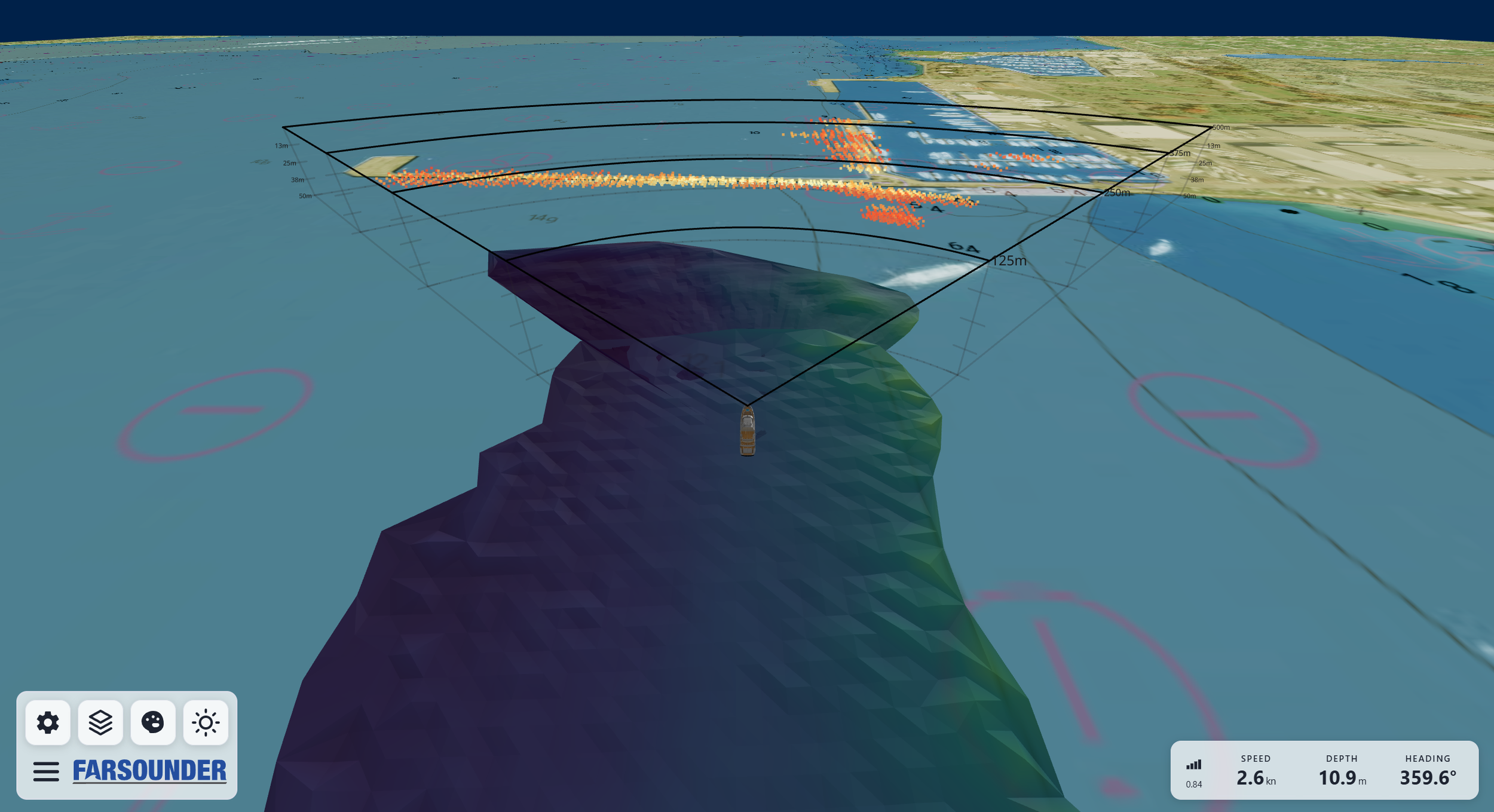
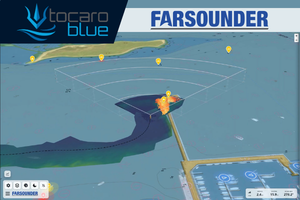
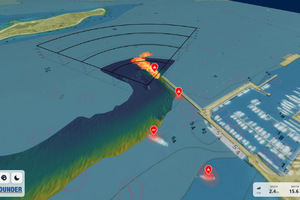
Future-proofing the bridge with Argos 3D FLS for next-level navigation
FarSounder’s latest innovations transform the user experience. At the heart of the next software release, we are rolling out a reimagined User Interface (UI). It features a 3D environment with aerial imagery and nautical charts, layered with Argos Sonar data. Overlays of AIS and ARPA targets are included, letting operators see moving and static hazards in context. The result is a cleaner, smarter way to view and interpret the navigation data.

Reducing the Risk of Whale Shipstrikes
In the evolving world of marine navigation, staying ahead of the curve is more than an advantage. It’s a necessity. The future is led by innovative companies and through collaborations. FarSounder’s commitment to these pillars is exemplified in its latest software release.

Cassie Stetkiewicz | Director of Operations at FarSounder
Cassie Stetkiewicz is a seasoned operations leader and strategic visionary, currently serving as the Director of Operations at FarSounder, a pioneering technology company based in Warwick, Rhode Island, USA. With over eight years at FarSounder, she is now at the helm of Administration, Marketing, and Business Development. Cassie has played an integral role in steering the company through a period of innovation, global expansion, and increased market relevance.

The importance of yachting’s role in whale conservation
When I helped found FarSounder 24 years ago, our motivations came from an environmental perspective: “Can we develop a technology that can help vessels avoid hitting rocks causing oil spills, and avoid whales causing ship strikes?”. Today, our 3D forward-looking sonar products are being used by vessels around the world exactly for these types of applications. These products didn’t materialise magically. Rather, my team and I spent years researching, developing, testing and improving the technology.
What Lies Ahead
When navigating in unknown and uncharted waters, it becomes even more important to know what lies ahead, including underwater hazards and shallow bottoms. FarSounder’s Argos Forward Looking Sonar (FLS) systems are currently the only products on the market capable of generating a real-time, three-dimensional image at navigationally significant ranges of what is under the water ahead of your vessel.

DARPA’s NOMARS USV navigation system enhanced by Argos 3D FLS
FarSounder is proud to announce that, through Serco, Inc., its Argos 3D Forward Looking Sonar (FLS) is included in the navigation system on the Defense Advanced Research Projects Agency’s (DARPA) recently completed No Manning Required Ship (NOMARS) demonstration vessel. The project is the development of Defiant—a first-of-its-kind unmanned surface vessel (USV) designed to operate autonomously for extended durations at sea without any onboard crew.

Whale Ship Strike Reduction
Whales have fascinated humanity for millennia, inspiring myths, music, and maritime culture. Anyone who has had the rare opportunity to witness these majestic creatures up close knows that it’s an awe-inspiring and deeply emotional experience. However, a number of whale species are shockingly close to the brink of extinction, and ship strikes are a leading cause.

How Can Unmanned and Autonomous Vessels Leverage 3D Forward Looking Sonar
The rise of uncrewed vessel operations demands technologies that prioritize both performance and environmental responsibility. Technologies like FarSounder’s Argos 3D FLS are not only extending the operational reach of USVs but are also helping shape a future where navigation is both smarter and more environmentally conscious.

Advantages of Forward Looking Sonar: Q&A with FarSounder
Jake Palmer, Relationship Manager at FarSounder discusses forward-looking sonar technology, emphasizing its ease of integration into autonomous vessels, the company’s commitment to environmentally friendly design, and emerging trends in the unmanned maritime sector.

FarSounder’s New Whale Spotting and Safe Vessel Operations Class
The yachting industry thrives on exploration, luxury, and the experience of sailing through some of the most pristine waters on the planet. Yet, with this privilege comes responsibility. As stewards of the sea, yacht owners, captains, and crew must be proactive in marine conservation efforts in one of the biggest challenges vessels can face: avoiding collisions with whales—some of the planet’s most magnificent yet endangered creatures.

FarSounder Expands Citizen Science Capabilities with Whale and Trash Reporting Feature
FarSounder is excited to announce the release of a new citizen science feature in its latest SonaSoft™ software update. Building on its existing Data Sharing Program, this release introduces the ability for users to report whale sightings and floating trash/debris—further integrating marine conservation into day-to-day navigation for Argos users.

Underwater Acoustics
“There’s lots of connections between engineering students and music,” he says, referring to the mathematics of music. “You don’t notice a great bass player unless they mess up. Obstacle avoidance is like that: Best case, you avoid catastrophe.”